特种机器人研究现状与趋势展望
2024-04-03 董蓉 国务院发展研究中心国际技术经济研究所研究五室今年以来,特种机器人技术领域蓬勃发展,各种创新型机器人问世,展现出巨大应用潜力和影响力,如用于火星探索的“超级蛇形机器人”、用于海洋监测和研究的“水母”机器人以及可以自毁的软体机器人等。同时,在人工智能技术赋能下,特种机器人功能更加强大。未来,特种机器人在太空探索、军事侦察、紧急救援等领域的应用将更为广泛,更好地满足各领域任务需求。
一、特种机器人的定义与分类
特种机器人,又称为专用服务机器人,属于服务机器人的一种。根据国际机器人联合会(International Federation of Robotics,IFR)的定义,服务机器人是一种半自主或全自主工作的机器人(不包括从事生产的设备),它能完成有益于人类的服务工作。服务机器人可分为专用服务机器人和家用服务机器人两类。其中,专用服务机器人是在特殊环境下作业的机器人,又称特种机器人,如水下作业机器人、空间探测机器人、抢险救援机器人、反恐防暴机器人、军用机器人、农业机器人、医疗机器人及其他特殊用途机器人;而家用服务机器人是服务于人的机器人,如清洁机器人、康复机器人等。
特种机器人的早期研究集中在军事领域。二战期间首次出现了用于军事目的的遥控机器人。德军制造的“歌利亚”遥控炸弹被认为是现代遥控军用机器人的鼻祖,这一时期的机器人主要用于地雷探测和拆除,以及军事侦察任务等。随着科技的不断发展,特种机器人逐渐开始在民用领域得到广泛应用。例如,水下作业机器人可在人类难以到达的水下完成维修和勘察任务,大幅提高了人类的工作效率。
特种机器人的分类较为复杂,根据不同的要素可有不同的分类方法。本文按照特种机器人使用的空间(陆域、水域、空中、太空、多空间)进行分类描述,对特种机器人的最新研究成果加以介绍分析。
二、研究现状
伴随着科技的发展和需求的增长,特种机器人应用领域继续增加,不论是在陆地、海洋还是太空中,都有新式特种机器人的身影。
(一)陆域机器人
(1)可自毁的侦察机器人
2023年8月,韩国首尔国立大学研究人员开发出一款可以自毁并不留任何痕迹的机器人。这种机器人由一种柔性硅树脂材料制成,当暴露在紫外线下时,该树脂会释放氟离子,加热材料并使其迅速降解,只留下油状液体。该机器人还配备了温度传感器阵列、应变传感器和光电探测器阵列,通过温度传感器和光电探测器监测状况来确定何时触发机器人的自毁。这项技术可以确保机器人在执行监视、侦察和运输任务时,携带的敏感数据不会被敌方或未经授权的人访问。一旦任务完成或被敌人发现时,操作员可以触发内置的紫外LED,使机器人在不到两小时内自行分解成无法恢复的形式。此外,这些机器人还可以用于在危险区域执行搜索任务等,具有广泛应用空间。
(2)多功能侦察机器人
2023年12月,俄罗斯赫鲁廖夫大将物资技术保障军事科学院的研究人员开发出一款多功能机器人,能够执行技术侦察技术、排雷、撤离伤员、发射无人机以及对其充电。这是一种轻型无人驾驶平台,采用Kevlar机身,配备机械手、PKT机枪、烟幕系统、带有可伸缩发射平台和充电装置,位置发射器和地雷探测系统。机器人的主要功能包括侦察武器和地形、维修工作和疏散伤员。无人机降落在机器人上后,通过连接位于平台底部和无人机腿部的磁性触点,为无人机电池充电。因此,本发明可以简化设计并提高技术智能机器人的可靠性,提供探测地雷和其他爆炸装置的能力,实现双工通信和为无人机充电。
(二)水域机器人
(1)多功能水下探测机器人“Jellyfish-Bot”
2023年4月,德国马克斯普朗克智能系统研究所(MPI-IS)的科学家受水母启发,开发出一个多功能水下机器人——Jellyfish-Bot。Jellyfish-Bot体积小、节能且几乎完全静音。它采用电动液压致动器作为人工肌肉,通过电流驱动机器人,同时具备空气垫和防水组件以提供稳定性。这一设计使得机器人能够优雅迅速地游动,动作看起来像真正的水母。

图1:多功能水下探测机器人“Jellyfish-Bot”
Jellyfish-Bot具有广泛的应用潜力,特别是在清理海洋垃圾方面。它可以在复杂的海洋环境中搜寻和搬运垃圾、收集脆弱的生物样本,如鱼卵等。此外,Jellyfish-Bot几乎无声地运行,不会对周围环境产生负面影响,从而使其能够与水生物种温和地互动,成为海洋生物学研究的理想助手。Jellyfish-Bot代表了水下机器人技术领域的一项革命性创新,为应对海洋塑料污染等全球环境问题提供了新的解决方案。
(2)仿“螳螂虾”机器人
2023年11月,中国浙江理工大学和英国埃塞克斯大学(University of Essex)的研究人员合作开发出一款仿生机器人,灵感来自虾螳螂虾,旨在探索和监测水下狭窄环境。该机器人结构参考生物螳螂虾,采用扁平身体和流线型尾叉设计,有效减小水流阻力。刚柔耦合设计降低水对机器人的影响,提高在水下运动中的稳定性。该机器人由5对人工腹足和柔软的身体组成,通过调整腹足的运动频率、振幅和相位差,实现速度和稳定性的平衡。经过原型测试,机器人在水下表现出色,最大速度达到0.28米/秒,最小转弯半径为0.36米,展现了在狭窄和复杂水下环境中进行探索任务的潜力。研究团队计划进一步优化机器人的结构、形状和硬件系统设计,实现在狭窄水下环境中的自主移动,并增加信息获取设备,以更精确地实现闭环运动控制。未来希望将该技术应用于海洋环境的监测和救援。
(三)空中机器人
(1)能够在受损后恢复飞行功能的昆虫级机器人
2023年3月,美国麻省理工学院的研究人员开发出具有弹性的“人造肌肉”,可以让昆虫级大小的空中机器人在遭受严重损伤后有效恢复飞行性能。实验显示,这种昆虫机器人在被10根针扎穿或一侧翅膀被剪掉20%的情况下仍能飞行。研究人员使用一种名为“介电弹性体制动器”的柔性材料作为“人造肌肉”,它能将电能转化为机械能,为昆虫机器人两侧的翅膀提供动力。最关键的是,这种“人造肌肉”材料有一种故障自清除机制,能断开电极与微小损伤部位的连接,让装置继续运作。对于较大的损伤,研究人员开发出一种激光修复技术,能让以往必须报废的昆虫机器人重新投入使用。据评估,过去需要报废的机器昆虫经过修复后,可恢复87%的飞行能力。研究人员表示,这种机器人具有很高的鲁棒性和适应性,可以用于各种任务,如环境监测、灾难救援、生物学观察等。
(2)可全方位稳定飞行的“蜜蜂”机器人
2023年5月,美国华盛顿州立大学的研究人员开发出一种可在各个方向稳定飞行的蜜蜂机器人(Bee++)。这款Bee++原型机重量为95毫克,翼展为33毫米,比重约10毫克的真正蜜蜂大,但它完全实现了典型飞行昆虫所展示的六度自由运动。Bee++拥有4个由碳纤维和聚酯薄膜制成的机翼,以及4个控制机翼的轻型驱动器,一次可实现自主飞行5分钟,是全球首款能够在各个方向稳定飞行的原型机。该研究团队在2019年首次制造出一个质轻到可以起飞的四翼机器人,但很难控制其复杂的偏航运动。为了解决这个问题,研究人员从昆虫身上得到启发,改进了机器人的物理设计,并发明了新的控制器。研究人员调整了机器人的翅膀,使其在一个倾斜的平面内拍打,还将机器人每秒拍打翅膀的次数从每秒100次增加到160次。这种机器人可用于人工授粉、狭小空间内的搜救、各种环境中的生物研究或环境监测等多项应用。
(四)太空机器人
(1)外星生物生命探测器(EELS)

图2:外星生物生命探测器(EELS)
2023年5月,美国国家航空航天局(NASA)喷气推进实验室(JPL)对用于穿越极端地形的蛇形机器人进行了测试。该机器人被称为“外星生物现存生命探测器”(Exobiology Extant Life Surveyor,EELS),重100千克,长4米,由10个可以旋转的相同组件构成,使用螺纹进行推进、牵引和抓握。EELS蛇形机器人能够自主绘制地图、穿越和探索以前无法到达的目的地,而无须人类实时操作。其目标之一是寻找可能隐藏在“土卫二”冰壳下的生命迹象。据现有资料显示,EELS具有许多突破性超强功能,主要表现在:一方面该机器人具有高度适应性。EELS已经在沙地、雪地和冰雪环境中进行了测试,表现出高度的适应性。它可以在地球、月球和更远的地方选择出安全的运行路线,包括连绵起伏的沙地和冰地、悬崖峭壁、对漫游车来说过于陡峭的陨石坑、地下熔岩管道和冰川内部空间。另一方面该机器人具有高度自主性。由于地球和深空之间存在通信滞后,EELS被设计成一种能自主感知所处环境、计算风险、行进的机器人。
(2)探索火星的类蜥蜴机器人
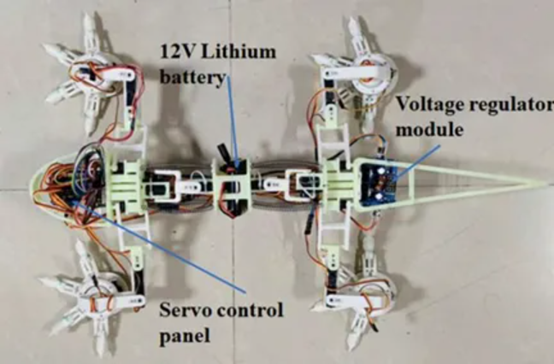
图3:探索火星的类蜥蜴机器人
2023年2月,中国南京航空航天大学的研究人员开发出一种新的以蜥蜴为灵感的四足机器人,以帮助探索火星。该机器人具有灵活的身体结构,可以复制沙漠蜥蜴的动作和运动方式,从而能够克服在软土上移动和攀爬岩石等难题。研究人员创建了一系列运动学模型来确定机器人的运动,并在模拟和原型测试中对其进行评估。该团队目前正在研究机器学习模型,以使机器人的动作适应不同的地形,并计划添加一个持续供电系统。
(五)多空间机器人
2023年3月,美国卡内基梅隆大学(Carnegie Mellon University)的研究人员开发出一种可以在不同的环境条件下改变自己的形状和运动方式的新型软体机器人,可实现快速从陆地转移到海洋,无需重新配置。
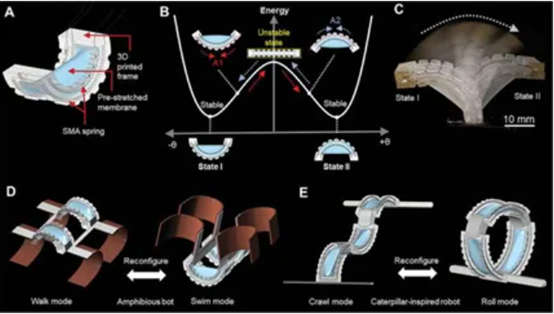
图4:可在陆地和水中自适应运动的软体机器人
该软体机器人约为手机大小,由两个双稳态执行器组成,四个角上各安装了一个弯曲的执行器。其中双稳态执行器是实现从步行状态无缝切换到爬行、跳跃和游泳状态的主要部件。该双稳态执行器由包含形状记忆合金弹簧的3D打印软橡胶制成,弹簧可根据电流做出收缩反应,从而导致制动器弯曲。在陆地上时,四个弯曲的执行器可以充当腿来行走。在水中时,双稳态执行器会改变机器人的形状,将弯曲的执行器置于可充当螺旋桨的理想位置,完成游泳动作。研究人员称,该软体机器人具有很高的灵活性和适应性,可以应用于多种场景,例如执行海洋救援任务、与海洋动物互动等。
三、特种机器人的发展趋势
相对于一般的工业机器人及家用服务机器人,特种机器人的工作环境和作业条件更为复杂,对机器人结构和功能也提出了更高的要求。因此,未来特种机器人领域将呈现出更多的创新和发展。
一是微型化。当前,机器人的使用场景逐渐趋向于精确化、狭窄化和复杂化,这种任务场景的需求加速特种机器人向着微型化方向发展。微型机器人具有灵活性高、隐蔽性强的特点,能够在狭窄、危险或难以到达的环境中执行任务。2022年5月,中国清华大学研发出一种可在亚厘米级管道中高效运动的管道探测机器人,可用于航空发动机管路检修等相关领域。此外,在军事应用中,微型化机器人可以潜入敌方阵地,执行侦察、监听和破坏任务;在医疗领域,微型化机器人可以进入人体内部进行精确的治疗和手术。微型化已经成为特种机器人领域中一个新兴的研究分支,是当前的研究热点之一。
二是智能化。随着人工智能和自主系统技术的进一步发展,特种机器人将变得更加智能和自主,能够更灵活地适应各种任务环境。同时,多模态感知、协作控制等技术将推动特种机器人在多领域协同作业中发挥更大的作用。2023年6月,谷歌DeepMind发布RoboCat AI模型展现出机器人自我学习的巨大潜力,为机器人学研究提供了崭新的方向。智能化特种机器人不仅能够感知环境、作出决策,还能够适应复杂多变的任务场景。通过融合深度学习、机器学习等技术,特种机器人可以从经验中学习,不断提升自身的适应能力和智能水平。
三是仿生化。自然界生物体经过亿年的进化,形成了高度适应环境的结构和功能,一直以来都是研究人员开发新式特种机器人的灵感来源。通过模仿生物体,机器人可以获得更高的适应性,能够在复杂和不确定的环境中执行任务。机器人仿生化有助于其在特定环境中更隐蔽、安全地完成任务。2023年7月,美国加州大学圣地亚哥分校研究人员受小海龟启发开发出一种新型机器人,它可以在沙子下游泳,还可以使用模仿海龟幼体超大鳍状肢的前肢将自己挖出来。该机器人成为唯一能够在5英寸深的沙子中行驶的机器人,可用于环境监测、粮仓检查和灾害应对等多个领域。
四、结语
得益于人工智能技术、仿生学和新材料的发展,特种机器人的应用领域不断增加、功能愈发强大,部分机器学习和深度学习等技术使机器人能够更好地感知环境、作出决策并执行任务。展望未来,特种机器人将拥有更强大的人工智能、更高的自主性、更长的续航能力和更广阔的应用空间,继续成为解决各种复杂任务和挑战的有力工具。
(作者:董蓉 国务院发展研究中心国际技术经济研究所研究五室)