昆虫半机器人:迈向精准运动新纪元
2025-05-09 techbriefs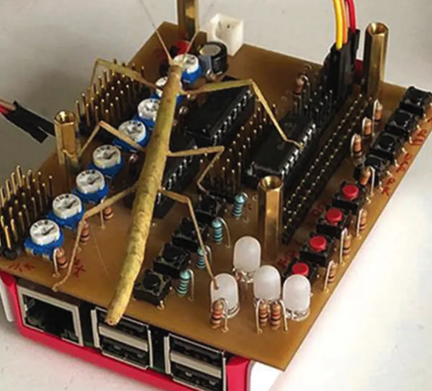
实验过程中,研究人员将竹节虫的躯体固定,并通过电刺激其三块腿部肌肉中的一块,以模拟行走动作(图片:www.tohoku.ac.jp)
昆虫半机器人听起来可能像科幻小说里的情节,但它实际上是一个相对较新的现象,其原理是利用电刺激来控制昆虫的运动。这些被科学地称为“昆虫—计算机混合机器人”的装置,预示着小型、高机动性和高效性的未来的发展方向。
然而,尽管已经取得了重大进展,但由于不同昆虫的神经和肌肉系统之间存在巨大差异,进一步的研发变得复杂起来。在最近发表在《eLife》杂志上的一项研究中,一个国际研究小组研究了棒状昆虫腿部肌肉中的电刺激与合成扭矩(使腿部移动的扭力)之间的关系。
他们聚焦于昆虫运动中起关键作用的三条腿部肌肉:一条负责推进,一条控制关节刚度,还有一条负责在腿部支撑与摆动之间进行转换。实验过程中,研究人员将竹节虫的身体固定住,然后对三条腿部肌肉中的一条进行电刺激,以产生类似行走的运动。
这项研究由日本东北大学工程学院机器人学系副教授大脇大介(Dai Owaki)领导。实验在德国比勒费尔德大学(Bielefeld University)进行,由沃尔克·杜尔(Volker Dürr)教授和约瑟夫·施米茨(Josef Schmitz)教授负责管理的实验室开展。
大脇大介(Owaki)表示:“基于我们的测量结果,我们可以建立一个模型,该模型能够预测当对腿部肌肉施加不同模式的电刺激时所产生的扭矩。我们还发现了电刺激持续时间与产生的扭矩之间几乎呈线性关系,这意味着我们只需观察所施加电脉冲的长度,就能预测出将产生多大的扭转力。”
仅通过几次测量,大脇大介及其合作者就能将这一模型应用于每一只个体昆虫。基于这些发现,科学家们将能够优化生物混合机器人的运动控制,使其动作更加精确。
虽然研究团队知道他们的见解可能会催生出具有多种应用、适应性强且机动性高的设备,但他们仍指出了一些需要解决的关键挑战。大脇大介说:“首先,需要在自由行走的昆虫身上进行模型测试,并且必须优化电刺激,以更紧密地模拟自然的神经肌肉信号。”