
本文简述了在过去的几年中我们在自动机器人研制领域所取得的进展,并介绍了在工业环境中,为成功实现机器人自动化部署所解决的基本问题。本文还将为我们描述在更复杂的场景中,自动化技术落地应用所面临的一些挑战,如城市车辆自动化等。
机器人操作器最初在20世纪50年代末期取得应用,它率先被人们引入汽车制造领域。在随后的发展中,液压系统逐渐被电动机取代,这使得机器人更加灵活可控。起初,机器人仅在极其受限的使用场景中被用于如焊接等高重复性的工作,它们的操控设计完全从机器人内部的运动学角度出发,并不涉及其所处环境状况的感知信息。
该领域的首次创新始于20世纪80年代初期,我们引入了由相机提供的视觉反馈,并添加了几种不同模式的传感器以监测环境并与环境相互作用,如激光与力传感器等。然而,由于上述机器人操作器大多情况下均在固定区域进行作业,故机器人位置的不确定性几乎为零,对我们而言,其外部环境也可以被轻易模型化并深刻理解。
当机器人需要在其作业环境中移动时,情况便截然不同了。为解决这个问题,定位与感知这两项新的核心能力就变得至关重要。在作业区域内移动的机器人需要被定位,即确定其相对于导航参考系的位置和方向。此外,我们更需对相邻作业域的情况进行准确的展现,以确保机器人可以安全移动而不与其他物体发生碰撞。
我们在室内环境中首次成功实现了地图测绘以及机器人定位演示,并主要对超声波传感器的信息进行处理以获得高清晰度地图。此过程包含了在手动操作下,在作业环境中移动机器人以构建导航地图,以及在随后的自动作业中通过该地图对机器人进行定位等。而下一个突破则体现在上述两个过程的同步实现中,该技术开拓了一个非常活跃的研究领域,即我们所熟知的即时定位与地图构建(simultaneous localization and map-ping, SLAM)。这些新算法支持在探索新区域时同时进行地图构建以及定位,这在很大程度上促进了大型室内自动设备的部署。
户外环境中,自动技术的首例重要应用为野地机器人,它涉及了诸如装卸(图1)、开采以及防御等领域的大型机器的自动化。

图1. 在澳大利亚布里斯班港口运行的全自动跨运车
在野地机器人学中成功应用该技术需要确保机器始终处于受控状态,即使在某些部件出现故障时亦是如此。这需要开发基于各种不同模式传感器(如雷达和激光)的新传感技术。这些概念对于高完整性导航系统的开发至关重要。该系统如参考文献中所述,包含了多套基于不同物理原理的传感器,这可以确保不会有两种传感器同时发生故障。类似的设计理念在其他领域亦有应用,如在采矿机器人中,我们运用自动化孤岛的设计理念,即开发一个只允许自动化系统运行的区域以实现局部优化。这种基本约束对于在众多工业实践中自动化系统的成功开发及应用至关重要。
机器学习技术已开始在野地机器人的自动化中发挥重要作用。在过去的5年里,我们已经见证了大量不同种类的有监督学习和无监督学习的机器学习算法取得成功。其中,它们在农业领域中取得的应用更令人印象深刻(图2)。现如今,基于视觉所开发的系统已经取得了广泛应用。它们能够将作物与杂草进行分类并加以区别,亦可以监测作物的健康状况并远程自动监测土壤条件。

图2. 智能机器人在农业领域的应用
自动化机器人与人类以及其他手动操作机器之间的交互是一个更为复杂的问题。该研发领域的一个热门课题便是城市环境中无人驾驶汽车(autonomous vehicle,AV)的运行(图3)。
一辆AV必须以一种可预见程度高且非常安全的方式与其周围动态变化的世界进行交互。其感知系统负责在所有可能出现的环境条件下提供车辆周围的完整信息感知,这包括车辆附近的所有固定、移动物体的位置。此外,安全的AV运行还需要估计其他驾驶员和行人的意图,以便能够对突发情况进行预测并相应地制定应对策略。

图3. 在大学校园内运行的AV电动汽车
大多数汽车制造商及相关研究机构目前正在投入大量资源,以期在未来几年内引入这项技术。这加速了与自动化相关的所有领域的进展,包括新算法的开发以及低成本传感能力和计算能力的构建。
通过利用各种传感器,如激光器、雷达、照相机和超声波装置等,我们在机器人的感知方面取得了重大进展。每种模式的传感器都有其优点和缺点,任何强大的设计都必须对不同的传感器类型进行组合才能实现功能的完整性。
任何种类的传感器都可能会出现故障,这可能是由天气或其他环境因素等多种情况所造成的。正如我们所熟知的,尽管相机可以获取优质的适宜分类的纹理信息,但是在大雨、大雪以及极端雾霾天气下,它的表现总是不尽如人意。而激光可以为我们提供良好的距离信息,对于雨水环境也更具鲁棒性。然而蒸汽、重尘、烟雾等环境对它的影响是灾难性的。众所周知,雷达在各类天气情况下均表现稳定,但它却缺少其他感知方式所具有的分辨率以及判别能力。目前,我们的主要研究方向即是致力于融合不同模式的传感器,以保证在所有可能的作业条件下其传感能力的完整性。
另一个取得巨大进步的领域是深度学习。大量计算和内存资源的使用使得我们可以训练具有大量数据的高维模型。深度学习的最大优势在于我们不需要设计特征以训练模型。该技术中的视觉传感自动标定技术,也就是我们通常所说的语义标注技术令人印象深刻(图4)。上述方法使用大量数据来训练卷积神经网络以实现自动地对图像中的每个像素进行分类,并与可能集合内的类进行对应。上述网络的一个突出优势在于它们可以被重新训练并在计算量相对较低的其他场景中取得应用。这通常被称为“学习转移”。这些技术是现今最先进的高级驾驶辅助系统(advanced driver-assistance system, ADAS)和AV的重要组成部分。
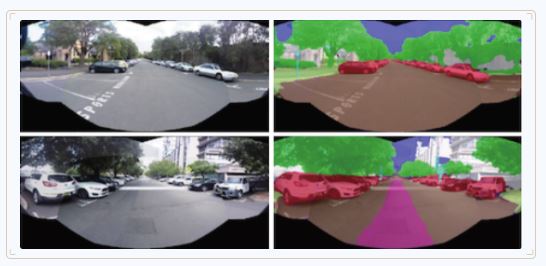
图4. 原始图像(左)、对象的语义标注(右上),以及车辆路径预测(右下)
AV技术的发展仍然存在重大挑战,如定位、感知完整性、与手动驾驶车辆及行人的交互以及AV技术本身的安全认证等。
(1)定位。AV技术需要一定的定位精度,这只能通过使用预先制作的高清地图来实现。构建和维护这些地图的过程非常具有挑战性,因为这类地图必须具有鲁棒性,并且其使用应当在全国或世界范围内具有普适性。
(2)高完整性感知。目前,有关技术的尝试只能在特定的良好天气及环境条件下进行,用于感知的典型传感器,如视觉和激光传感器,在浓雾、雪或灰尘下操作时可能会产生灾难性的故障。
(3)学习如何驾驶。驾驶是一个多模块协同作用的过程,不同的组块交互影响、协同工作以达到同一个目标。这种能力对于机器人而言仍然非常困难,因为这需要推断所有交互参与者的意图并施以一定的沟通技巧,以便通过安全高效的方式做出决策。
(4)AV的认证。AV的发展现状表明,在城市道路环境下,AV的运行是可行的。但我们很难证明在所有可能的交通环境下AV均可安全运行。参考文献为我们介绍了该领域的一项综合性研究,作者承认将始终存在涉及AV的交通事故。然而这些作者提出将上述事故识别为一组正常的车辆行为,这样便可确保AV技术永远不会成为造成事故的罪魁祸首。
本文简要概括了机器人自动化发展的历程。过去的几年见证了新的大型计算机和内存资源的出现,见证了感知能力的更新与提升以及机器学习方面的重大发展。显而易见,在不远的将来,这些技术将使得一整套全新的自动化设备融入我们的生活。
本期的文章将为我们展现机器人自动化在车辆以及未来的类生命机器人中的广泛应用。还将为我们带来与执行机构以及智能制造相关的论文。