非洲鼹鼠用坚固的门牙咬入地下,开挖隧道,而欧洲鼹鼠则利用其强大的前肢将脱落的土壤推回自己身后。受鼹鼠启发,日前,韩国先进科学技术研究院(KAIST)开发自动在地面上挖洞的Mole-bot机器人。
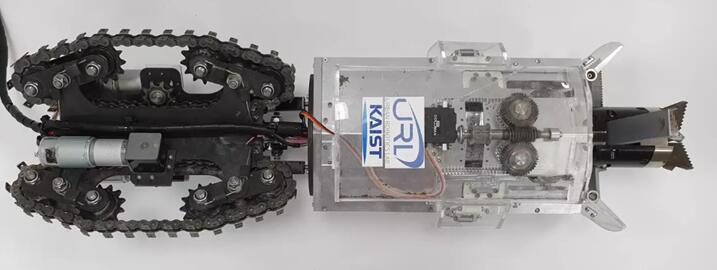
Mole-bot有一种类似于螺旋桨的可扩展钻头。当它旋转并磨碎进入土壤时,其折叠的锯齿状叶片向外延伸,以挖出比机器人圆柱体宽的隧道。接下来,机器人使用位于钻头两侧的两个可扩展的铰接金属法兰将松散的土壤推回前端。后部的三个履带状履带将Mole-bot向前推动,加上在其中间部分的枢转机械“腰部”,可以在挖洞时改变方向,能够利用3D同步定位和制图(SLAM)技术进行自我定位。
除了在其他行星上的使用外,Mole-bot还可在采矿业中使用。与现有的钻井系统相比,该系统更便宜,劳动强度更低,更环保,不需要泥浆化合物即可清除碎屑。当前的原型是该机器人的第三版,尺寸为84厘米长×25厘米宽(33英寸×9.8英寸),重26千克(57磅)。
首席科学家Hyun Myung教授说:“我们期待使用这种类型的钻孔机器人进行更有效的资源勘探,希望Mole-bot在广泛的应用范围和经济可行性方面对机器人技术市场产生非常积极的影响。”。