
外部感知技术是智能系统本身相对其周围环境的定位,负责检测距离、接近程度和接触程度之类的变量,便于智能系统的引导以及对物体的识别和处理。外部感知技术包括视觉感知、触觉感知、接近度感知、超声感知、电磁感知以及多传感器融合感知等。以智能机器人为例,外部感知技术的传感器一般安装在机器人的头部、肩部、腕部、腿部、足部等。
「 1. 视觉感知」
视觉感知,顾名思义,客观事物通过人的视觉在人脑中形成直接反映,引申来说,智能视觉感知是利用计算机技术处理并且更好的解释视觉图像,使机器能够拥有类似人类或者其他有视觉处理系统的高等动物具备理解外部世界的能力[1]。
在智能制造领域,视觉感知是目前研究的热点和难点,尽管在智能视觉感知这个研究板块中仍存在一些难以理解、待解决的问题,但该技术目前还是取得了长足的进步,尤其是最近几年视频内容以及深度学习的迅速发展,智能视觉感知研究获得了大量的数据支撑。各国均顺应时代的发展,进行了相应的规划,制定并且规范了项目部署,数据量的增加使大范围视觉感知以及无人平台成为重要的研究方向, 相关行业各公司也都推出了与视觉感知相关的智能产品。因此,目前已有许多重要的应用场景,如广泛应用于智慧交通、智能汽车、智能安防、微电子、医疗影像分析、军事、机器人等众多领域。
视觉感知的实现主要是通过视觉传感器,视觉传感器具有从一整幅图像捕获光线的能力,并且整合成图像,图像的清晰和细腻程度常用分辨率来衡量,以像素数量表示,因此,无论距离目标数米或数厘米远,传感器都能“看到”细腻的目标图像。
视觉传感器通常是一个摄像机,有的还包括云台等辅助设施。它是一个将图像传感器、数字处理器、通讯模块和I/O控制单元集成到一个单一的相机内,独立的完成预先设定的图像处理和分析任务的传感器。视觉传感器可分为被动传感器和主动传感器,被动传感器是用摄像机等对目标物体进行摄影,获得图像信号;主动传感器是借助于发射装置向目标物体投射光图像,再接收返回信号,测量距离。
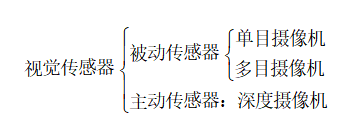
视觉传感器分为三大类:一是电感耦合器件(CCD);二是MOS图像传感器,又称扫描光电二极管阵(SSPA);三是电荷注入器件(CID)。目前使用最广泛的是电耦合器件制成的视觉传感器,飞利浦、柯达、富士公司等都有相关产品。
飞利普公司拥有业界最大尺寸的CCD图像传感器,在数码相机的应用中,其35mm尺寸的CCD已经应用在“Contax”的数码相机中,成为专业数码相机的代言人。其次该公司还具有独特的“Frame- Transfer CCD”(面扫描)技术,该产品在应用中可实现30~60幅/s的速率。这是真正视频信号的速度。(图1)

图1 CCD传感器(飞利浦)
柯达公司的CCD图像传感器采用了广受好评的 TO CCD(氧化铟锡)技术,而不是传统的聚硅化合物。其特点是敏锐度更高,透光性比一般CCD图像传感器提高了20%,对于一般CCD图像传感器感应较弱的蓝光以及抗杂讯干扰方面有突破性的改善,其对蓝光感应能力提高了2.5倍,同时大幅降低了杂讯干扰,使影像更锐利、色彩更加准确,为专业数码摄影提供了高解析度、锐利度的影像。(图2)

图2 CCD传感器(柯达)
富士公司研制的“Super CCD(超级蜂窝结构)”使用的是八边形的感光单元,即蜂巢的八边形结构,因此其感光单元面积要高于传统CCD图像传感器。这样会获得三个好处,一是可以提高CCD图像传感器的感光度;二是提高动态范围;三是提高了信噪比。这三个优点加上SuperCCD更高的生成像素成为富士公司在数码相机产品上的最大卖点。(图3)
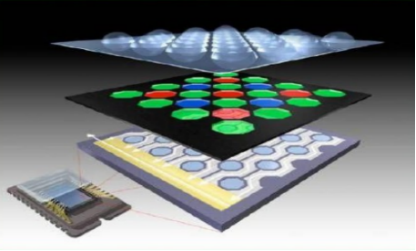
图3 蜂窝结构(富士)
当前,智能“眼睛”点亮了AI技术的发展,人工智能越来越趋向无人化,在无人机、无人驾驶汽车以及机器人等方面的应用越来越广泛。
「 2. 触觉感知」
触觉传感器的研究已有40多年的历史。当前,随着硅材料微加工技术和计算机技术的发展,触觉传感器已逐渐实现集成化、微型化和智能化,涉及多种类型,但其工作原理主要集中在压电式、压阻式、电容式、光波导式和磁敏式等。另外,聚偏二氟乙烯和压敏导电橡胶等作为敏感材料已经被广泛应用于触觉传感器的研制中。
1)压电式触觉传感器
压电式触觉传感器是基于敏感材料的“压电效应”来完成测力功能的。由于材料内部的晶格结构具有某些不对称性,因此材料产生的应变会使内部电子分布呈现局部不均匀性,从而产生净电场分布。因此,在晶体表面上出现正负束缚电荷。其电荷密度与施加的外力成正比关系。
2)压阻式触觉传感器
压阻式触觉传感器的工作原理是基于敏感材料的压阻效应——当某些材料受到外力作用时,材料的电阻值会因外部形态或内部结构的变化而相应地变化。一般来说,材料的电阻值的变化与所受外力之间存在一定的数学关系。
3)电容式触觉传感器
电容式触觉传感器的工作原理是将测得的力信息转换为电容量变化。这种传感器的敏感单元是一个具有可变参数的电容器,它最常用的形式是由两个平行电极组成,极间介质是空气。一般来说,用于力测量的触觉传感器是通过测量由外力引起的电极间距的变化来反映相应的受力信息。另外,可以通过测量电容器的面积变化来获得角位移或线位移,或者可以通过测量介质的变化来测量不同介质的温度、密度、湿度。
「 3. 接近度感知」
传统的智能感知技术基本都包含视觉和触觉传感器,视觉感知技术提供方位捕捉和物体距离信息,触觉感知提供接触情况下的应力及其分布信息。实际的应用场景下,往往存在物距较小的情况,此时视觉传感器往往会无法捕捉距离信息,而同时感知技术未接触到物体,触觉感知技术也无法正常获取物体信息,为感知技术的“盲区”。所以智能感知技术在具有视觉、触觉能力的同时,还需要接近度感知的辅助。接近度感知技术主要感知较小物距下的距离信息(几毫米至厘米),在弥补视觉、触觉感知技术“盲区”的同时,使得智能感知技术在视觉捕捉物体接近物体抓取物体全过程中,连续地检测物体以及环境信息。表1为视觉、距离以及接近传感器的功能对比[2]。
表1 视觉、距离以及接近传感器的功能对比表

接近度传感器是用来控制自身与周围物体之间的相对位置或距离的传感器,用来探测一定距离范围内是否有物体接近、物体的接近距离和对象表面形状及倾斜等状态。它一般在智能感知技术中起两方面作用:对物体的抓取以及避障。接近度传感器一般用非接触式测量元件。接近度传感器有霍尔效应传感器、电磁感应式、光电式、电容式、气压式、超声波式、红外式以及微波式等多种类型。其中光电式接近传感器的应答性好,维修方便,尤其测量精度很高,是目前使用最多的传感器,但其信号处理复杂,使用环境受到一定的限制(如环境光度偏及或污浊)。(图4~图6)
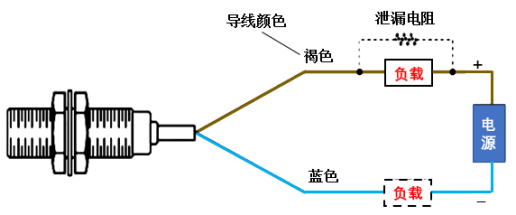
图4 接近度传感器原理图

图5 接近度传感器实物
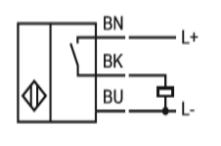
图6 一种接近度传感器的接线形式
「 4. 超声波感知」
声波是声音的传播形式。声波是一种机械波,由物体振动产生,借助各种介质向四面八方传播。按声波的频率分类,频率在20Hz以下的声波称为次声波,频率在20kHz以上的声波称为超声波,如图7所示。20Hz~20kHz频率范围的声音是人耳可听到的声音。
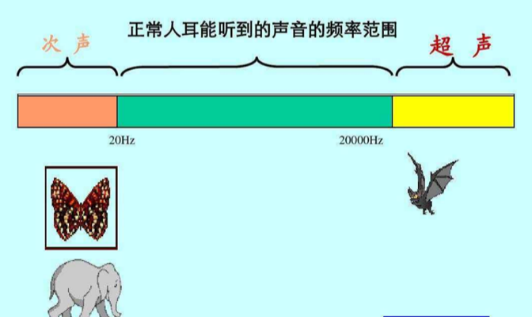
图7 声波范围
超声波传感器主要由发射器、接收器和控制部分等构成,也称超声波探头超声波换能器,如图8所示。其发射器和接收器用来完成超声波的发射与接收。

图8 超声波传感器实物图
按工作原理分类,超声波传感器分为压电式、磁致伸缩式、电磁式等形式。其中,压电式换能器最为常见,材料主要是压电晶体和压电陶瓷。目前,铁电陶瓷是应用最广泛的带压电效应的材料。另外,也有具有压电效应的有机材料,但是,由于其稳固性较差,迄今为止其应用还十分有限。
超声波检测广泛应用在工业、国防、生物医学等方面。(图9)
图9 超声波探鱼器
「 5. 电磁感知」
电磁感知作为智慧家庭与城市、安防检查、生物医学等领域的基础性、关键性和共性问题,既是电子与信息领域的研究焦点,也是世界各国角逐的颠覆性技术。
然而,现有电磁感知在体制和算法两方面存在一系列挑战性难题,例如成本高、效率低、精度差等,这些不足在一定程度上制约了其在未来5G/6G、人工智能时代的进一步发展。
参考文献
[1]中国科协智能制造学会联合体. 中国智能制造重点领域发展报告(2019-2020)[M]. 北京:机械工业出版社,2019.
[2]Lihui Wang. An overview of function block enabled adaptive process planning for machining[J]. Journal of Manufacturing Systems,2015.