
现在,哈佛大学约翰·A·保尔森工程与应用科学学院(SEAS)的研究人员已经建立了一种增材制造软机器人的新方法,使用3D编织方法可以整体“打印”整个软机器人。这一研究成果目前已在Advanced Functional Materials报道。
研究人员表示:“软机器人社区仍处于寻求替代材料方法的阶段,这些方法将使我们能够超越更经典的刚性机器人形状和功能,纺织品很有吸引力,因为我们可以通过选择它们的组成纤维以及这些纤维如何相互作用来从根本上调整它们的结构特性,使用'裁剪和缝纫'方法,你需要制造大片的纺织材料,然后将其切割成通过缝合或粘合组装的图案 - 这通常涉及高水平的人力劳动,每个接缝都会增加成本和潜在的故障点。对于制造复杂的机器人设备来说,这可能是一个巨大的挑战。”
3D针织可以生产无缝的衣服,几乎没有材料浪费。研究人员想知道这种方法是否可以用于制造基于纺织品的软机器人。
研究团队购买了一台老式打孔卡针织机,为了自动化针织过程,团队还需要开发软件,可以指导针织设备(通常是几十年前的机器)用各种类型的纱线制造复杂的结构。在最初的实验充满希望之后,该团队转向了更现代化的自动化机器。
卡内基梅隆机器人研究所(Carnegie Mellon Robotics Institute)助理教授詹姆斯·麦肯(James McCann)合作开发了该软件。该团队希望开发和表征各种软致动器——他们不只是在构建一种模式,而是在构建一整套参数化模式,传统的针织设计软件很难做到这一点,传统针织设计软件通常专注于手工开发单个输出,而不是易于调节的参数输出系列。
为了创建解决方法,该团队使用“knitout”文件格式(用通用编程语言编写的编织描述)描述3D图案,然后开发代码来翻译这些针织描述以在他们想要的针织机上运行。以像knitout这样的通用针织格式开发参数化图案的很酷的事情是,拥有不同类型针织机的其他小组可以使用和构建相同的图案,而无需大量的翻译工作。
在建立3D针织工艺后,研究人员进行了一系列实验,首次创建了一个关于各种针织参数如何影响所得材料机械性能的广泛知识库。该团队测试了 20 种不同的纱线、结构等组合,描述了不同的针织结构如何影响折叠和展开、结构几何形状和拉伸性能。
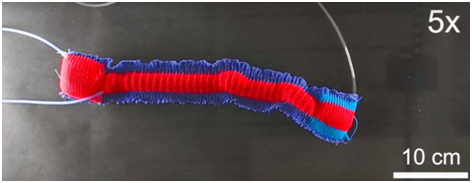
使用这些结构的组合,他们展示了许多不同的编织机器人原型,包括各种类型的夹持器设备,带有弯曲和抓取附件,多腔爪,尺蠖状机器人和蛇状执行器能够拾取比设备本身重得多的物体。
团队希望创建一个库供工程师借鉴,以开发各种软机器人,因此研究人员表征了许多不同针织品的机械性能,3D针织是一种思考增材制造的新方式,关于如何制造可以重新配置或重新部署的东西。已经有工业机器支持这种类型的制造 ,可编程纺织品将对软机器人的制造产生类似的影响,就像纤维增强复合材料对高性能飞机和汽车的制造一样。