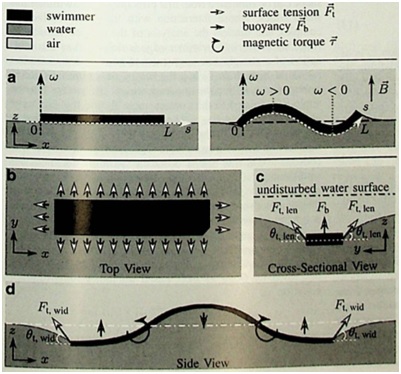
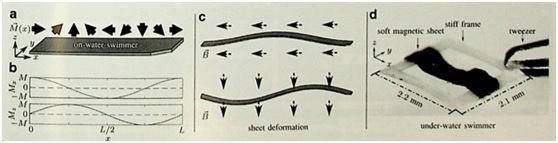
微型软机器人的驱动和控制由于其有限的机载空间和柔性体而成为具有挑战性的问题。智能磁性材料是应对这些挑战的有希望的候选者,可以通过磁场远程供电和引导以用于功能性,例如游泳,抓握和泵送。在这项研究中,我们将波动的游泳步态编程为一个由柔性磁性均匀复合材料制成的小矩形片。该板在其整个主体上具有正弦磁化分布,并在旋转的均匀磁场中变形为波状形状,与其长度一致。片材的行波状变形与周围的液体相互作用并以双向非完整游泳步态推动片材。由于缺乏对所涉及的基本物理原理的理解,以前对该表的研究无法准确地模拟变形或系统地表征游泳。我们第一次根据潜在的物理原理开发出一个模型,用于解释和预测板材变形,使其能够在空气 - 水界面游动并在水下产生推进力,并具有额外的刚性框架。在实验中证明了毫米级片材的游泳能力和可操作性,并且在各种情况下的游泳性能被定量地表征。软游泳板可能用于微动物任务,例如在难以进入的工作空间中运送货物或运输单个细胞。
与需要特定组件和结构的传统执行器和传感器不同,智能材料具有材料本身固有的功能。这些材料,例如压电陶瓷,形状记忆合金,电活性聚合物等,通常用于从输入信号引起运动的弯曲,因此可用于机器人,航天和生物工程等领域。已经证明了智能磁性复合材料,其由具有嵌入的磁性微粒的柔性弹性体材料组成。当嵌入的磁性颗粒以空间变化的模式磁化时,通过施加致动的均匀磁场可以从复合材料产生复杂的变形,这产生了复合材料中的磁扭矩。
之前已经提出了小型磁致动器,大多数现有的小型磁致动器具有以这种或那种方式连接的不同磁性元件。相比之下,这种智能磁性材料,当用作微型机器人技术中的执行器时,可以实现运动,例如弯曲和行波游动推进。这些运动源于整个材料体积中编程的磁化,从而导致简单的机械,其中设备的行为是编程材料所固有的。在毫米级或更小尺寸范围内创建复杂运动是机器人社区中的持续挑战,其旨在使机械能力小型化,例如运动和操纵。
在这里研究的智能磁性材料中,永磁微粒嵌入弹性体基质中,在存在外部施加的磁场的情况下提供体积分布的力和/或扭矩。这些力和扭矩取决于材料内磁性颗粒的空间磁化分布,以可预测的方式使材料变形。如果磁化分布可以任意地图案化,则该软磁复合材料存在大量潜在的形状变形,并且这些变形可用于实现期望的微小功能。在以前的工作中,使用这种软磁复合材料制造微夹钳,其形状变化用于夹持和释放微型物体并将它们组装成三维(3D)结构,而其他用磁力矩驱动软物质的实例则由Erb et在某些条件下,例如在固定自由边界条件下的梁弯曲,已经探索了预测和设计这些装置的形状。
机器人游泳已经在各种尺寸范围内进行了广泛的研究。微型机器人的游泳特别具有挑战性,因为时间可逆的运动不会产生净推进力(Purcell的扇贝定理)和微小机器人的有限机载空间,这可以防止它们来自电力或驱动系统。受各种微生物的启发,研究人员提出了几种能够起到波动游泳步态的装置,其中大部分是由光驱动的。数学分析表明,游泳速度大致与行波频率,波幅的平方和波长的倒数成正比。对于给定的输入能量,行波正弦波(TSW)被认为是最佳模式用于波动游泳。