
在过去的几年中,让机器人正确快速地抓住物体的技术已经取得了巨大的进步,并催生了几家机器人公司,正在片断采摘和电子商务实施领域提供商业应用,包括RightHand Robotics、Kindred.AI和Osaro等。另一家起源于大学研究领域的新公司Ambidextrous Robotics.正在准备“抓住”在机器人抓取领域的地位。
这家总部位于加利福尼亚州伯克利的公司正在开发专有的机器人抓取软件,可以让机器人抓住几乎任何物体。该公司建立在加州大学伯克利分校开发的正在申请专利的技术基础之上,特别是Dexterity Network,又名Dex-Net项目,它使用模拟到现实的转移学习来自动训练各种机器人,夹子和相机的深度神经网络。Jeff Mahler博士和Ken Goldberg博士组建了Ambidextrous Robotics,这是一家为电子商务应用中基于AI的机器人拾取开发软件的初创公司。Dex-Net算法结合了数千个3D对象模型,分析扳手力学,结构域随机化和合成点云的模拟,生成了一个深度神经网络,可以“无需进一步培训即可高效地计算新物体的强大机器人拾取点”。
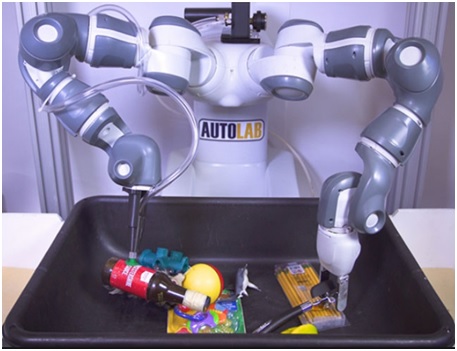
2019年1月,该小组展示了Dex-Net 4.0,它现在可以训练平行钳口和真空吸盘式抓手的政策,包括500万个合成深度图像,抓取和3D物体堆积产生的奖励。使用带有两个夹子的物理机器人,该政策“始终清除多达25个新物体的箱子,可靠性大于95%,每小时超过300个平均值。”