除了少数例外,机器人手柄并不是因为它们具有柔软触感而闻名,通常不能被精致的物体所信任。然而,由于布法罗大学科学家开发的减震夹具,这可能即将发生变化。
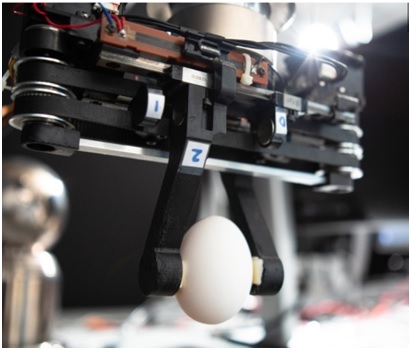
由AssocEhsan Esfahani教授领导的团队创建的实验性新夹具采用两个电动指状物,沿着轨道朝向或远离彼此滑动。每个指状物都安装在一个磁性底座上,磁性底座位于两个“排斥”的钕磁铁之间,用于推动它。两块磁铁实际上都不接触底座,所以底座的两侧和相应的磁铁之间都有一个气隙 - 这个间隙可以起到减震弹簧的作用。
当两个手指靠在一起以抓住它们之间的物体时,每个手指两侧的磁铁相对靠近其底座,通过推动手指保持手指牢固地固定就位。也就是说,仍然存在一点气隙,当抱着脆弱的物体时,手指可以“稍稍”给予。
随着该物品随后被抬起和移动(通过附着夹具的机械臂),夹具总是可能意外地撞击障碍物。如果发生这种情况,集成传感器会检测到撞击,并通过将磁铁移动远离手指瞬间响应,减小了排斥力,允许两个手指通过相对于夹持器的其余部分暂时滑动来吸收冲击。
一旦障碍物被清除,磁铁就会重新移回,将手指推回到原来的位置。此外,该系统不仅可以保护正在运输的物品,还可以防止工厂工人受到工业机器人的伤害。“这些夹具设计用于与人合作的协作机器人,”Esfahani说,“他们将成为帮助者,因此他们需要安全,并且可变刚度夹具有助于实现这一目标。”该技术现已通过衍生公司商业化,与第三方机器人手臂一起使用。最近发表在IEEE工业电子技术杂志上的一篇论文中对此进行了描述,并在视频中进行了演示。