机器人以各种不同的方式前进。有些走在腿上,有些走在轮子上,有些爬在铁轨上。但是在某些时候,他们会遇到障碍,以色列本古里安大学的可重构连续轨道机器人(RCTR)通过站起来并越过障碍来解决这个问题。
RCTR由内盖夫本古里安大学的大卫·扎鲁克(David Zarrouk)的生物启发和医疗机器人实验室提供。该实验室过去曾负责许多新颖的推动器,包括使用波动来爬行,游泳和爬升的单动力声表面波,可以在地面飞行和机动的无人机以及僵硬地移动的机器人。
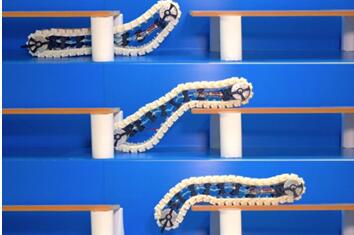
Zarrouk的团队再次选择最小化RCTR,在当前的原型机中使用三台电动机,目标是在未来将其减少到两台。随着机器人的前进,组成连续滚动轨道的柔性连杆可以锁定在适当的位置,从而使履带保持刚性,或者保持解锁状态以提高灵活性。如果连杆以一定角度锁定,则前端可能会上升以遇到障碍物。
混合使用锁定和未锁定的链接可以看到RCTR跳过一个低矮的障碍物,因此它的任何轨迹都不会与它接触,通过弯曲其身体而在不平坦的地形上滚动,并向上弯曲弥合前方道路的空白。例如,如果这种机器人是为搜索和救援目的而开发的,那么这种灵活性将使它能够在灾难现场勘测现场时,无需面对倒塌的基础设施或陨石坑和坑洼而重新设置路线。
但是正如IEEE Spectrum指出的那样,当前的原型只能沿直线移动,因此在移出实验室并进入实际应用之前,需要采用某种操纵机制。如果将自动驾驶技术集成到设计中,这样就可以在没有操作员控制的情况下完成其工作,这也将很有用。