
最近几年各种移动机器人开始涌现出来,不论是轮式的还是履带式的,如何让移动机器人移动都是最核心的工作。要让机器人实现环境感知、机械臂控制、导航规划等一系列功能,就需要操作系统的支持,而ROS就是最重要的软件平台之一,它在科研领域已经有广泛的应用。
不过有关ROS的书籍并不多,国内可供的学习社区就更少了。本期硬创公开课就带大家了解一下如何利用ROS来设计移动机器人。

分享嘉宾李金榜:EAI科技创始人兼CEO,毕业于北京理工大学,硕士学位。曾在网易、雪球、腾讯技术部有多年linux底层技术研发经验。2015年联合创立EAI科技,负责SLAM算法研发及相关定位导航软件产品开发。EAI科技,专注机器人移动,提供消费级高性能激光雷达、slam算法和机器人移动平台。
移动机器人的三个部分
所谓的智能移动,是指机器人能根据周围的环境变化,自主地规划路线、避障,到达目标地。
机器人是模拟人的各种行为,想象一下,人走动需要哪些器官的配合?首先用眼睛观察周围环境,然后用脑去分析如何走才能到达目标地,接着用腿走过去,周而复始,直到到达目标地址为至。机器人如果要实现智能移动,也需要眼、脑和腿这三部分的紧密配合。
腿
“腿”是机器人移动的基础。机器人的“腿”不局限于类人或类动物的腿,也可以是轮子、履带等,能让机器人移动起来的部件,都可以笼统地称为“腿”。
类人的腿式优点是:既可以在复杂路况(比如爬楼梯)下移动、也可以更形象地模仿人的动作(比如跳舞),缺点是:结构和控制单元比较复杂、造价高、移动慢等。
所以大部分移动的机器人都是轮式机器人,其优势在于轮子设计简单、成本低、移动快。而轮式的也分为多种:两轮平衡车、三轮、四轮和多轮等等。目前最经济实用的是两个主动轮+一个万向轮。
眼睛
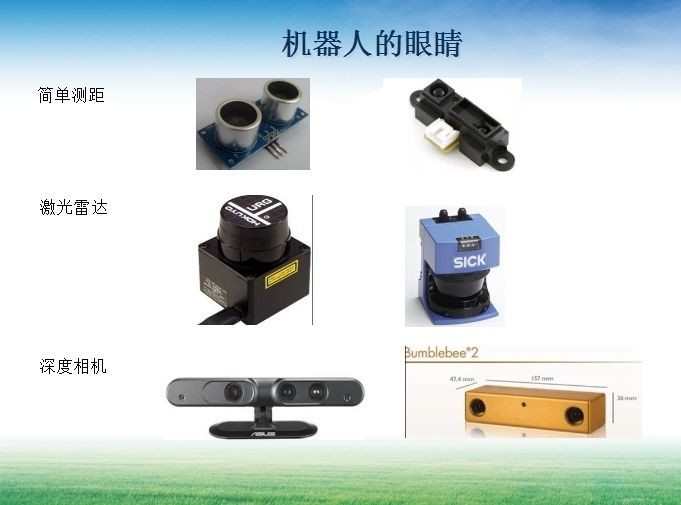
机器人的眼睛其实就是一个传感器。它的作用是观察周围的环境,适合做机器人眼睛的有激光雷达、视觉(深度相机、单双相机)、辅助(超声波测距、红外测距)等。