
相较于市场上出现的同类机器人产品,基于自主研发技术,新松七轴机器人在负载或成本上都更优。国产机器人将跨入人机协作新时代。
众所周知,目前较先进的传统机器人一般最多具有六个自由度,其中,前三个自由度引导夹手装置至所需的位置,而后三个自由度用来决定末端执行装置的方向。在三维空间内,刚体需要六个独立参数确定其位姿,因此,机器人的任务空间最多需要六个自由度就足够了,一般不要求机器人具有六个以上的独立自由度,而过多的自由度就会产生冗余自由度。
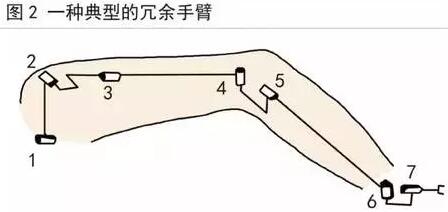
冗余度机器人,是指含有主动关节数多于完成某一作业任务所需的最少自由度数的一类机器人。其实,如上文所说,六个自由度是具有完成空间定位能力的最小自由度数,而增加的自由度便可改善机器人相关的运动学和动力学特性。
虽说真正产品化的七自由度工业机器人与传统的六自由度,甚至更少自由度的工业机器人相比,无论是从产品种类,还是销售占比差距都十分明显。但正是由于其拥有有别于非冗余自由度机器人的冗余特性,使得七自由度的机器人优于六自由度机器人,而成为人们关注的焦点,也使得对冗余度机器人的研究变得日趋重要。
我国研发始于20世纪90年代初期
我国对于七轴机器人的科研工作始于20世纪90年代初,而当时项目的领军人物正是我国已故的著名机器人技术专家、中国工程院院士张启先,而张启先院士的主要贡献之一便是完成了七自由度冗余机器人样机的研制。
上世纪80年代末,由于研制难度及其之大,国际上研制出七自由度冗余机器人样机的国家寥寥无几。而张启先院士率领课题组经过几年的艰苦拼搏,在1993年年底完成了首台七自由度冗余机器人样机的研制,并一次通过“863”课题验收和部级鉴定。
尽管我国在冗余自由度机器人方面取得一定成果,但主要停留在学术论文、科研报告和实验样机的阶段,并没有实现真正的产品化发展,这无疑制约了我国机器人产品向高端产业化迈进的步伐。