
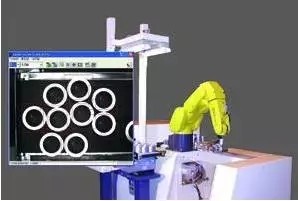
当我们谈论日益热门的工业4.0、智能制造这些话题时,机器人是一个无论如何也绕不开的问题。机器人的智能化程度影响着整个工业演化的进程,传统的机器人仅能在严格定义的结构化环境中执行预定指令动作,缺乏对环境的感知与应变能力,这极大地限制了机器人的应用。利用机器人的视觉控制,不需要预先对工业机器人的运动轨迹进行示教或离线编程,可节约大量的编程时间,提高生产效率和加工质量。这就是我们标题中提到的,基于机器视觉的工业机器人定位技术。这一技术在国内最早被应用于焊接机器人对焊缝的跟踪,而维视图像的视觉采集设备及图像处理软件,成为行业内视觉引导的先驱和首选。
典型的机器人视觉定位系统构成如图1所示,在关节型机器人末端安装单个摄像机,使工件能完全出现在摄像机的图像中。系统包括摄像机系统和控制系统:
(1)摄像机系统:由单个摄像机和计算机(包括图像采集卡)组成,负责视觉图像的采集和机器视觉算法。就目前行业技术发展水平来说,数字相机是比较理想的选择,其中维视图像的MV-EM/E系列工业相机提供了接口丰富的开发包函数,分辨率、帧率等覆盖面广,通用性及稳定性好,所以是我们推荐的首要选择。
(2)控制系统:由计算机和控制箱组成,用来控制机器人末端的实际位置。经CCD摄像机对工作区进行拍摄,计算机通过图像识别方法,提取跟踪特征,进行数据识别和计算,通过逆运动学求解得到机器人各关节位置误差值,最后控制高精度的末端执行机构,调整机器人的位姿。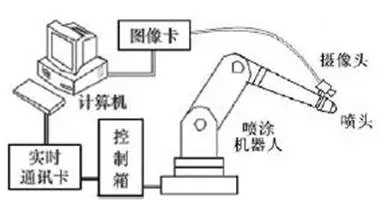
图1机器人视觉定位系统组成
下面我们来详细的解析一下视觉引导机器人的工作原理。首先,使用CCD摄像机(包括镜头等图像采集设备)将视频信号输入计算机,并通过软件对其快速处理。处理的过程是这样的:选取被跟踪物体的局部图像,该步骤相当于离线学习的过程,在图像中建立坐标系以及训练系统寻找跟踪物。学习结束后,相机不停地采集图像,提取跟踪特征,进行数据识别和计算,通过逆运动学求解得到机器人各关节位置给定值,最后控制高精度的末端执行机构,调整机器人的位姿。工作流程如下图所示。
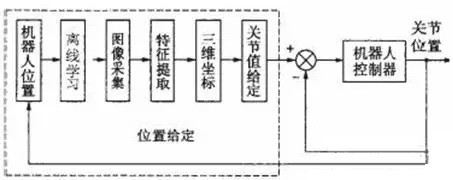
视觉定位系统软件流程图
这样,视觉定位系统将基于区域的匹配和形状特征识别结合,进行数据识别和计算,能够快速准确地识别出物体特征的边界与中心,机器人控制系统通过逆运动学求解得到机器人各关节位置的转角误差,最后控制高精度的末端执行机构,调整机器人的位姿以消除此误差。从而解决了机器人末端实际位置与期望位置相距较远的问题,改善了传统机器人的定位精度。