一般而言,机器人的“手”在具有牢牢握持力的刚性设备与较软、较温和的小工具之间有所不同,这些小工具会变得更笨拙。现在,科学家创造了一种附属物,结合了两者的最佳功能。
当要拿起沉重、坚固的物体时,机器人通常会使用两指抓爪。凭借其坚固的设计,它们没有特别柔和的触感,但可以施加很大的力量。身体较软、更柔顺的手用于提起易碎物品。这些东西不太可能弄坏东西,但是它们也没有特别牢固的抓地力。
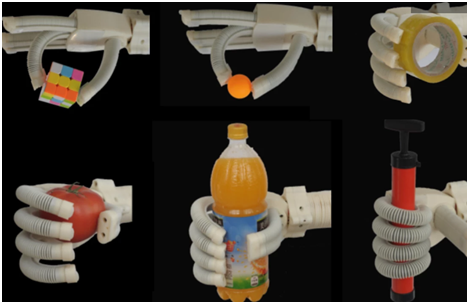
密歇根州立大学的研究人员着手缩小两者之间的差距。最终的原型具有四个手指和一个相对的拇指,每个手指都包含所谓的柔性混合气动致动器或FHPA。每个FHPA的核心是一个“骨状”板簧,外侧由较软的致动气囊包围。随着空气从这些气囊中抽出和流出,每个手指的打开和关闭都独立于其他手指。而且由于手指的外部比较柔软,它们符合易碎物品的轮廓,从而使这些物品保持完整。但是,与此同时,板簧所提供的抓取力要比完全软身的装置更大。
一旦技术进一步发展,启用FHPA的手就可以用于水果采摘、医疗和外科手术等应用中。