由哈佛大学的Wyss研究所的一名成员和一位索尼机器人工程师开发的“mini-RCM”占用的空间比目前手术室中笨重的机器人少得多。为遥控手术程序提供了更高的精度和控制力。
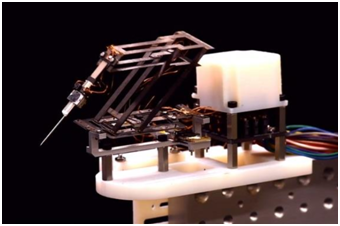
折纸风格的微型Remote Center of Motion机械手只有一个网球大小,重达一便士,并且成功完成了一项艰巨的模拟外科手术。
Wyss副教授Robert Wood和索尼的Hiroyuki Suzuki使用了Wood实验室开发的 Pop-Up MEMS制造技术,该技术将材料彼此叠层沉积在一起,然后以特定的模式进行激光切割可以像孩子的弹出式图画书一样“弹出”所需的三维形状。该技术简化了小而复杂的结构的批量生产,否则这些结构必须手工精心制作。
该团队创建了平行四边形形状以用作机器人的主要结构,然后制造了三个线性致动器来控制其运动–一个平行于平行四边形底部的上升和下降动作,一个垂直于旋转平行四边形的底部,以及平行四边形的顶端有一个在使用中可伸缩工具。
一项研究公告称:“结果是,该机器人比以前在学术界开发的其他显微外科手术设备更小、更轻。”
线性致动器围绕压电陶瓷材料构建,当施加电场时,压电陶瓷材料会改变形状。形状的变化将滑行单元沿轨道推动,并且线性运动使机器人运动。由于压电材料在改变形状时会固有地变形,因此该团队还集成了基于LED的光学传感器,以检测并纠正与所需运动的任何偏差,例如由手震引起的偏差。
为了模拟遥控手术的情况,研究小组将微型RCM连接到Phantom Omni触觉设备,该设备响应用户控制笔形工具的手的动作来操纵微型RCM。
第一个测试评估了人类通过显微镜观察并用手工追踪或使用mini-RCM追踪比圆珠笔尖小的正方形的能力。mini-RCM测试极大地提高了用户的准确性,与手动操作相比,误差降低了68%,这是特别重要的质量,考虑到修复人体小巧精致的结构所需的精度。
微型RCM在示踪测试中获得成功后,研究人员随后创建了一个模拟程序,称为视网膜静脉插管手术,在该模拟手术中,外科医生必须小心地将针头插入眼睛,以将药物注入到后方的细小静脉中。他们制造了一个与视网膜静脉相同大小的硅胶管-大约是人类头发粗细的两倍-并用连接在mini-RCM末端的针刺穿了硅胶管,而不会造成局部损伤或破坏。
迷你RCM不仅具有执行精细动作的能力,而且体积小巧,易于安装。如果发生并发症或停电,也可以用手将其移除。
研究人员旨在增加机器人执行器的力,以覆盖操作过程中遇到的最大力,并提高其定位精度。他们还在研究在加工过程中使用脉冲较短的激光,以提高微型线性执行器的传感分辨率。