
"我们论文的主要目标是为配备机载轨迹估计传感器的机器人(UAV或UGV)利用任意3D轨迹,"研究人员Ninad Jadhav表示,"这使得Wi-Fi信号接收机器人能够通过捕获所有在发射和接收机器人之间行驶的无线信号路径(我们称之为AOA配置文件)来估计其他相邻机器人的空间方向(方位角和海拔)。此外,我们还利用Cramer Rao边界表征了轨迹形状如何影响AOA轮廓。"
在之前的研究中,Jadhav和他的同事们专注于机器人协作场景,其中机器人遵循具有有限几何形状集(例如,线性或曲线)的二维轨迹。而他们创建的新系统则适用于机器人自由移动、遵循更广泛轨迹的场景。研究人员放宽的另一个约束是要求Wi-Fi信号发射机器人保持静止,而接收机器人移动并生成AOA配置文件,新方法考虑到了所有机器人的连续移动性,无论其是发射还是接收Wi-Fi数据包。
研究人员在一系列使用真实机器人的实验中评估了他们开发的系统,取得了非常好的结果。系统基本上捕捉了所有Wi-Fi信号路径在发射和接收机器人之间的信息,它通过利用接收机器人的轨迹来模拟一个虚拟的天线阵列,类似于合成孔径雷达。通过追踪这样的'空中天线阵列',就可以使用基于天线阵列理论(如MUSIC或Bartlett)的到达方向(DOA)算法来估计最强信号路径的方向。
在Jadhav及其同事创建的系统中,接收机器人首先使用Dan Halprin的CSI工具箱提取原始信号相位。随后,它将这个原始信号相位与自己的轨迹信息(即它的X、Y、Z三维坐标)相结合,以模拟一个虚拟的天线阵列。这使得系统可以计算出天线阵列连续元素之间的信号相位变化,最后,信号的变化被DOA算法用来获得AOA曲线。
该系统有很多优点。首先,它允许机器人估计其他机器人的位置,特别是在杂乱或未知的环境中,传统的传感器(如相机)可能不是监控的有效工具。因此,新系统可以为改善机器人在这种环境中的协调性提供新的可能性。
使用Cramer Rao边界对轨迹几何的表征,称之为轨迹“信息性”,是本研究的关键成果之一,因为它从理论上证明了3D轨迹确实比2D轨迹表现更好。Jadhav和他的同事所使用的“信息性”指标是一个很有价值的工具,可以测试机器人即将执行的动作是否可以提供一个高度准确的AOA轮廓,如果不能,是否可以采取一些措施来提高轮廓的准确性。在未来,他们开发的新系统可以用来加强机器人与机器人在未测绘和混乱环境中的协作。
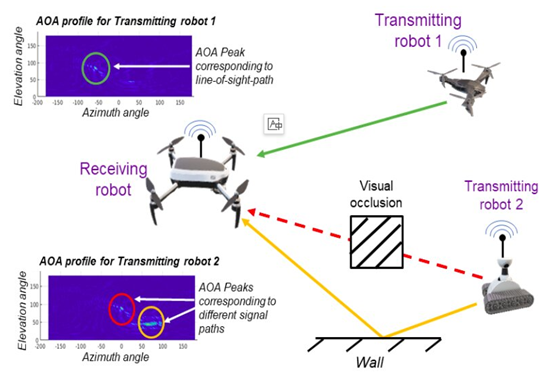
AOA轮廓图