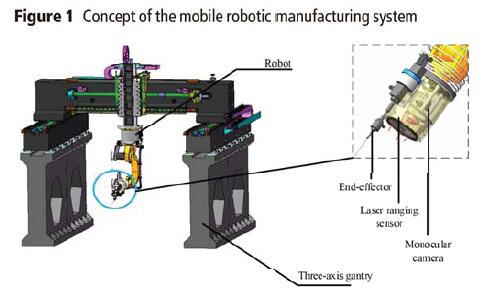
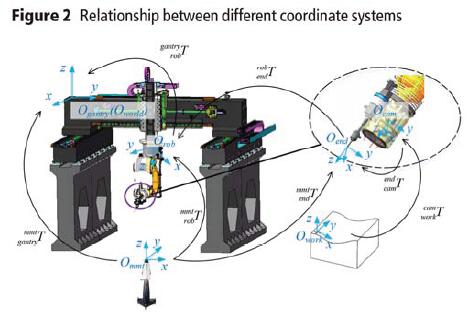
本文提出了一种在移动机器人制造系统中,在完成相应的任务之前,对放置在任意位置的目标物体进行姿态预测的视觉检测方法。设计/方法:基于手眼视觉系统,提出了一种单目视觉与激光测距相结合的混合视觉检测方法。采用激光位移传感器实现任意平面的法向对准,获取深度信息。单目摄像机测量二维图像信息。此外,本文还提出了一种机器人手眼关系的标定方法。调查结果:首先,提出了一种移动机器人制造系统的混合视觉检测方法。该检测方法基于由一个单目摄像机和三个激光位移传感器组成的手眼视觉系统,可以实现工件任意平面和空间位置的正常对准。其次,基于该视觉系统,提出了一种机器人手眼关系的标定方法,并将其成功应用于自行设计的移动机器人制造系统中。从而可以准确地建立工件坐标系与末端执行器坐标系之间的关系。实际意义:该方法能快速、准确地建立工件坐标系与末端执行器坐标系之间的关系。手眼视觉系统的正常对准精度小于0.5°,空间定位精度可达0.5mm。创意/价值:该方法能实现任意平面的法向对准和工件的空间定位,并能快速建立工件与末端执行器坐标系之间的位姿关系。此外,该方法能显著提高移动机器