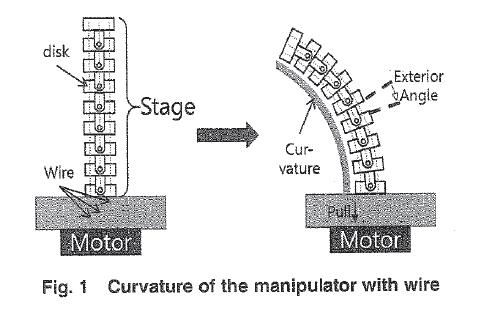
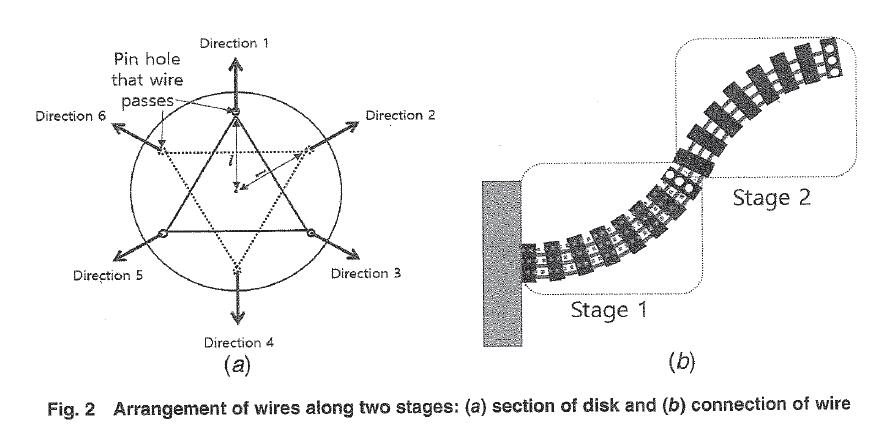
本文提出了一种利用图像识别实现自动控制的连续机器人。该机器人与现有的由连杆和关节组成的机器人相比,能够在更窄小的空间内运行。另外,由于它是通过图像识别自动控制的,因此无论技术水平如何,机器人都可以操作。机械手分为两个阶段,每一级连接三根导线,以最大限度地减少控制操纵器姿态所需的能量。操纵器的姿势通过调整导线长度来控制,类似于肌肉的松弛和收缩。本文采用Denavit Hartenberg变换和蒙特卡罗方法对机器人的运动学和工作空间进行了分析。在性能试验中,制作了一个9个目标的实验板,将机械手的速度调整到5、10、20mm/s,实验结果表明,该机械手实现了自动控制,达到了所有目标,误差分别为2.58、3.28和9.18mm。