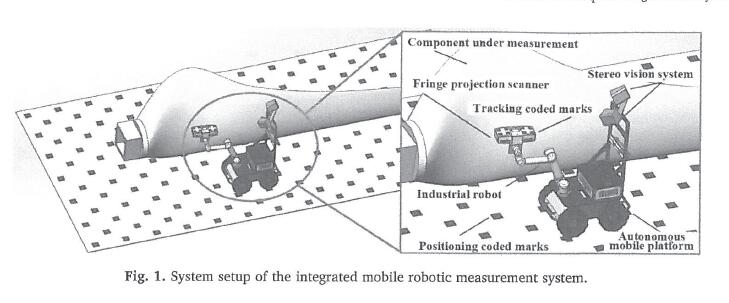
复杂曲面的大型构件是航空航天、能源、交通等领域的基础,而全三维测量和精度分析是控制制造质量的关键。现有的测量方法大多依靠人工检测,精度和效率都不理想。本文介绍了一种用于复杂曲面大型零件三维精确自动测量的移动机器人集成测量系统。该测量系统由移动机械手、条纹投影扫描仪和立体视觉系统组成,能够对大型复杂零件进行精确的非接触式三维测量。提出了一种基于立体视觉系统的手眼标定方法和扫描位姿跟踪方法,可以将扫描得到的局部点云随移动机器人在构件周围的运动精确地统一到一个公共坐标系中。通过对2.8m长风力机叶片模型的全表面测量和重构,验证了所提出的测量系统和方法的正确性。精度评估结果证明了该系统和方法的有效性。