
近年来,全世界众多的机器人学家一直在尝试开发能够人工复制人类触觉的机器人系统。此外,他们还一直试图利用软性材料而不是刚性结构,创造出越来越逼真和先进的仿生肢体和仿人机器人。
尽管有与质地有关的优势,但是由软性材料制成的机器人手往往无法收集广泛的感官信息。事实上,到目前为止,复制让人类收集物体触觉信息的复杂生物机制已被证明是极具挑战性的。
这一研究背后的想法是基于在人类中发现的本体感知框架,这是决定我们的身体位置和我们的肌腱/关节上的负载,试想一下,当你戴上眼罩,捂住耳朵时,你仍然可以感觉到你的手的姿势,手臂的位置,或一个杂货袋有多重,这种能力被称为本体感觉。我们一直在进行一个假手研究项目,正在寻找方法来解决现有假手缺乏感觉反馈的问题。在过去,机器人研究人员通常不把本体感与触觉联系起来。事实上,人类的本体感觉机制不允许有特别精确的反应,这可能就是为什么人类不使用它来识别物体或表面的纹理。
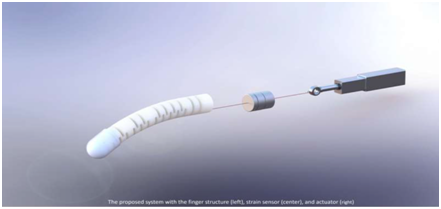
然而,由于工业传感器远比人类的本体感受器敏感,将其应用于机器人手指可以帮助研究人员收集更精确的触觉反馈。研究人员创建的原型系统由一个线性致动器、一条肌腱(或电缆)、一个应变传感器和之前研究的软体机器人手指组成。肌腱将手指连接到致动器上,应变传感器安装在肌腱的中间。当致动器被驱动时,它拉动肌腱,导致手指弯曲/伸直,肌腱上的应变也相应地改变。当手指接触到不同的物体时,传感器将输出一系列应变信号,以描述所接触的物体的特征。基本上,研究人员设计的技术从传感器的读数中提取特征。随后,它使用机器学习工具来破译机器人手指所接触的表面或物体的纹理和硬度。
研究人员通过使用他们创建的原型系统进行一系列测试,评估了他们的触觉感应技术。最后发现,该技术能够以较高的精确度(分别为100%和99.7%)破译纹理和硬度。
大多数现有的关于支配仿生手指的研究提议在指尖表面安装传感器。虽然这些研究产生了有希望的结果,但它们需要指尖传感器和物体之间的精确接触,而这在实践中往往无法保证。该研究的一个关键优势是传感单元在肌腱上,因此来自手指上任何地方的接触都会导致特征化的信号输出,可以利用它来推断触觉信息。这个研究小组推出的新触觉传感方法是基于在机器人肌腱上嵌入传感器,这种方法以前从未被测试过,他们发现这种方法非常有前途。在未来,他们开发的系统可用于开发更先进的机器人和假手,这些机器人和假手可以收集触觉和本体感觉反馈,而不需要与表面完美或精确接触。
研究人员现在正在探索这个系统的打滑检测能力,当我们人类操纵或抓取东西时,滑移几乎是不可避免的,因此滑移的检测和控制对于稳健和可靠的控制至关重要。因此,我们认为滑移检测将是一个很好的功能,我们的初步实验显示了真正有希望的结果。除了进一步开发他们的系统外,研究人员正在与一个著名的纳米技术实验室合作开发一种低成本的触觉传感器,这种传感器可以感知力/扭矩信号,并可以放在机器人的指尖上。他们已经创建了这种设备的几个原型,现在正在评估其性能。