
1. 工作原理
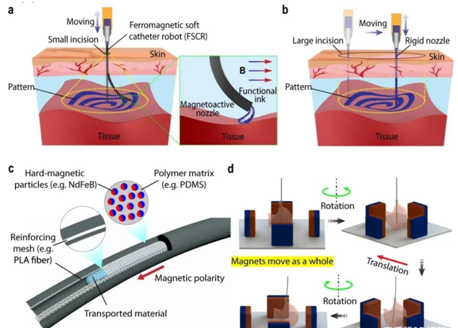
FSCR系统的工作原理如图1所示,FSCR系统通过远程磁驱动使细长棒状结构的软喷嘴到达体内指定位置(图1a),并实现原位打印功能性墨水(如损伤愈合药膏和电极凝胶等)。其中软喷嘴中设计有一层增强纤维网(图1c),增强了墨水挤出的稳定性,可以实现对有机硅、银浆、导电水凝胶等多种功能性墨水的挤出。磁场由四个数控电机驱动的永磁体施加(图1d),从而实现FSCR的平移和旋转运动。和具有刚性喷头的系统相比,FSCR可以在通过更小的切口在体内空间进行打印(图1b)。
2. FSCR的设计和制造
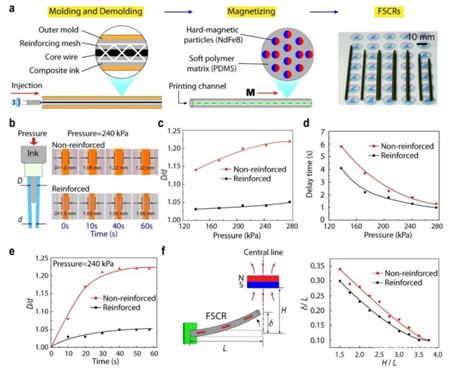
首先FSCR的主体使用注射成型方法制造。以管状模具作为外模板,钢芯线置于中心作为内模板,聚乳酸 (PLA) 纤维网插入模具内用以提升FSCR的机械性能。然后将未固化的聚合物树脂(聚二甲基硅氧烷,PDMS)与均匀分散的硬磁微粒(钕铁硼,NdFeB)混合制成的铁磁复合油墨注入管状模具中。待完全固化后,移除外模和内线,得到具有空心通道的FSCR主体(图2a)。最后再通过强脉冲磁场使主体中分散的NdFeB粒子沿轴向磁化。通过使用不同的模具,还可以制造不同尺寸的FSCR,该团队所能制作的FSCR最小内外径分别可达0.6mm和2mm,符合微创手术切口尺寸的标准。且固化NdFeB + PDMS 复合材料在毒性测试具有98.6%的细胞存活率,证明FSCR具有很高的生物相容性。
另外实验证明通过使用PLA网状增强结构,可以减小FSCR管制造时的横向膨胀率、提高打印分辨率和加快挤出速度(图2bcde)。同时该结构对磁控弯曲行为的影响不大(图2f),可以保持稳定的打印性能。
3. 磁控打印系统的实现
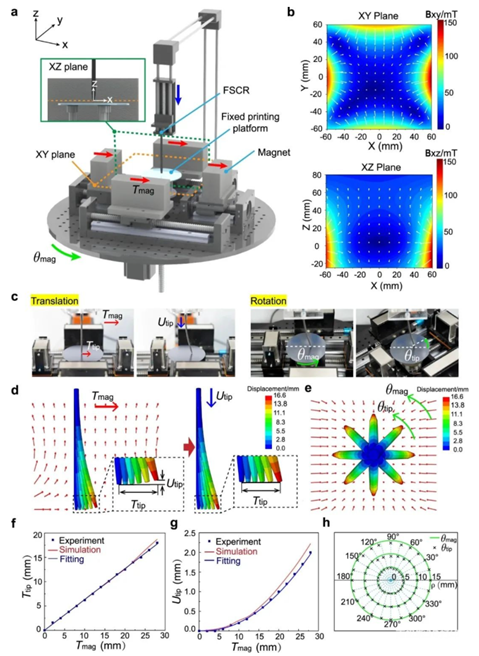
图3 (a)磁控打印系统示意图。(b)XY和XZ平面的磁通密度等高线图。(c)永磁体移动控制FSCR在X方向平移,同时Z轴下移补偿高度损失。永磁体旋转控制FSCR在XY平面的旋转。(de)磁场控制FSCR平移和旋转的仿真。(fgh)磁场控制FSCR平移和旋转的仿真数据与实验数据对比。
该团队开发的FSCR系统可以使用多种不同功能的墨水通过小尺寸创口在各种曲面上进行打印操作,与传统打印方式相比具有明显优势。虽然该打印技术目前处于起步阶段,在打印速度、分辨率和打印图案的复杂性等方面存在局限性。但该技术可以通过升级为6磁极系统提升控制自由度;通过使用术中CT等实时扫描工具建立闭环反馈实现更高的打印质量;通过改进材料的生物相容性、粘附性、固化时间等方法可以拓宽该技术的适用范围和前景,为外科微创手术提供新的可能。