
一种用于机器人应用的通用硬件架构FPGA设计
然而,目前在这些计算机上运行的大多数软件解决方案并不理想,因为它们的速度限制使它们无法实时处理特别大的数量。增强集成在机器人内部的计算机功能的一种可能方法是使用现场可编程门阵列 (FPGA),这是基于通过可编程互连连接的可配置逻辑块矩阵的半导体器件。
这些设备的一个显著优势是它们可以重新编程以适应特定应用。FPGA 可以显著增强机器人的计算能力,同时也使它们更适合特定应用。然而,迄今为止,将它们整合到现有系统中被证明是非常具有挑战性的,因为使用具有特定集成功能的单个加速器限制了它们的适用性。
德累斯顿工业大学 (TUD) 的研究人员最近开发了一种技术,可以开发集成多种硬件加速器的机器人。这项技术在IEEE Access发表的一篇论文中提出,最终可以促进用基于 FPGA 的组件替换为机器人系统供电的现有软件组件。
这项工作是在CeTI 项目背景下进行的,该项目旨在加强人与机器之间的协作,或者更广泛地说,是在真实、虚拟和远程环境中加强网络物理系统 (CPS) 之间的协作,特别是,它是一项结合嵌入式硬件研究(自适应动态系统)和软件建模的跨学科工作。
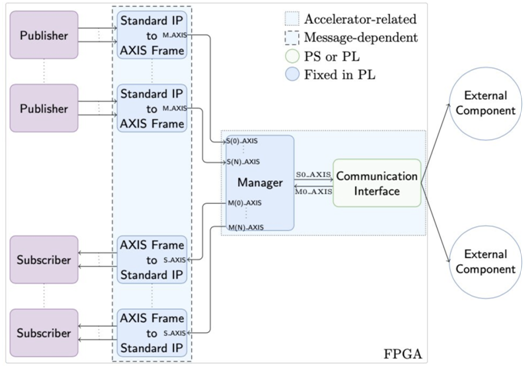
该研究探索了将 FPGA 集成到机器人系统中的可能方法。他们提出的方法对与机器人操作系统 (ROS)、ROS2 操作系统和潜在的其他软件解决方案相关的消息规范进行了全面分析。然后使用此分析的结果为机器人系统生成硬件接口和架构。该项工作展示了根据机器人专家的已知规范(ROS 消息)从应用程序的简单描述生成复杂的基于 FPGA 的系统的能力,有了这个,机器人系统的一部分可以被 FPGA 取代,从而创建性能更好、更节能的系统。
工具链可以生成创建高性能机器人系统所需的所有组件,不包括加速器逻辑,这需要由在系统上工作的开发人员进行编程。因此,新方法可以显著简化硬件架构和软件组件的接口,这对于那些创建机器人的人来说可能是一项繁琐的任务。
最初,研究人员表明他们的方法可以为基于 ROS 操作系统的系统生成硬件组件。然而,他们随后能够扩展其功能,使其也支持 ROS2 操作系统。
一项补充工作是测试基础设施,除了某些用例之外,研究人员更进一步评估所有现有 ROS 消息。事实证明,这非常有用,因为开发过程涉及多次迭代以获得强大的解决方案。研究目标是实现完整的 ROS/ROS2 全面支持。测试基础设施使我们能够捕捉错误并建立对我们研究的信心。
接下来的研究将侧重于扩展工具链以自动插入 FPGA 加速器(执行计算的地方),并包括动态部分重配置 (DPR) 以根据应用程序的当前需求动态更改加速器。未来,该方法可以为开发基于 FPGA的性能更好的机器人系统铺平道路。这些系统能够实时分析大量数据,从而帮助人类解决更复杂的问题。