
日本奈良科技研究所(NAIST)的研究人员最近发明了一种可用于提高通用装配机器人性能的软夹具。这种夹具是在IEEE国际机器人与自动化会议(ICRA)上发表的一篇论文中介绍的,它是基于通用干扰夹持器,该系统是由芝加哥康奈尔大学的机器人专家和iRobot共同开发的。
这种软夹具的灵感来自一种称为干扰夹具的软机器人夹具,它引起了机器人研究人员的广泛关注,研究的主要目标是提高夹具处理的装配零件的夹具的灵活性。研究人员希望开发一种通用的机器人装配系统,可以加快小批量生产过程。他们创造的软夹具可能是朝这个方向迈出的第一步,因为他们发现它可以提高先前开发的机器人夹具组装不同物品的能力。
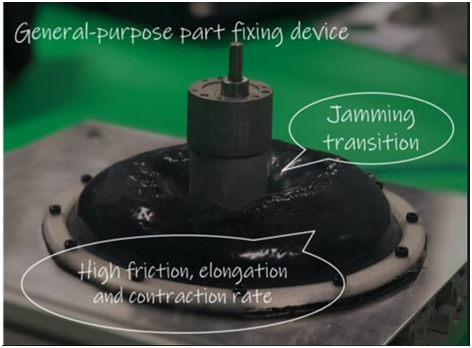
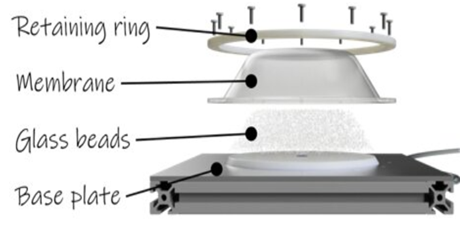
这种软夹具的一个关键优势是它的硬件结构,因为包含玻璃珠的硅胶膜能够实现卡住过渡,并为复杂的装配部件提供灵活性。研究人员开发的软夹具本质上是一个装满玻璃珠的袋子,上面覆盖着可延展的硅胶膜。该玻璃珠允许它进行最佳的干扰过渡,而硅胶膜提高了摩擦和灵活性,使夹具更好地抓住各个部件。
在该项研究中,研究人员还概述了一种方法,该方法可用于配置他们的软夹具的能力,以保持由夹具处理的部分物品的固定。为了有效地配置点动,该方法考虑了一系列因素,包括接触关系、可达方向以及附在夹具上的零件的重心。
研究表明,即使对它们施加外力,也有可能保持固定的硬件部件,如果未来的研究进展顺利,相信软夹具将突破通用金属夹具的灵活性限制。研究人员在一系列测试中评估了他们开发的软夹具,特别评估了其固定性能和多功能性(即,其处理不同形状和尺寸部件的能力)。在这些测试中取得的结果非常有希望,表明该夹具最终可用于创建可以更有效地完成装配任务的机器人。
研究人员已经改进了软夹具,以便夹具系统可以固定在夹具上的零件,可以通过放置在夹具下的摄像头跟踪夹具内表面上的标记来估计零件的姿态。现在计划开发运动规划算法,利用这种软夹具可以实现需要高装配精度的灵活又很精确的装配操作。