
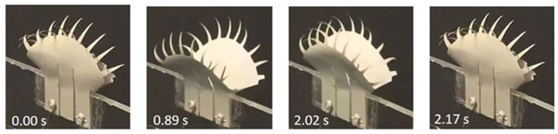
一个可以快速打开/关闭的维纳斯捕蝇器式的软体机器人原型
执行器是设备(如软体机器人)的一部分,通过将能量转换为功而产生运动。
使这种新的致动器设计发挥作用的是一种具有双稳态设计的结构。就好像是一个扣式发夹,它是稳定的,直到你施加一定量的能量(通过弯曲它),然后它就会扣成不同的形状,但这也是稳定的。
在新的热致动器的情况下,材料是双稳定的,但材料更喜欢哪种形状是由温度决定的。研究人员将两种材料叠加在一起,中间是银纳米线。这两种材料具有不同的热膨胀系数,这意味着它们在加热时以不同的速度膨胀。在实践中,这意味着当你加热它时,结构会弯曲。
然后,这种分层材料被塑造成一种设计,使其在一个方向上具有默认的曲率,比方说,它向下弯曲。当电压被施加到银纳米线上时,材料就会加热,使其向另一个方向弯曲。一旦达到一定的临界温度,材料就会陷入新的默认形状,迅速弯曲起来。当电压被移除时,温度会回落。一旦冷却到超过另一个临界温度,材料就会扣回它以前的默认形状,迅速向下弯曲。请注意,这两个临界温度是不同的;第一个温度更高。通过在纳米线上以有规律的方式施加电流,可以使材料来回扣动。为了演示该技术,研究人员创造了两个原型。其中一个原型模仿维纳斯捕蝇草的扣动行为,而另一个是一个 "爬行器",能够每秒移动超过一个身体长度。
潜在的应用范围包括从生物医学应用到假肢设备到高端制造业。任何你希望能够快速移动,但又希望避免刚性材料和传统机器人技术的应用。
该研究团队的下一个目标包括开发传感器和控制机制,可以更充分地实现驱动过程的自动化,使其比纯粹的手动控制更有效地运作。研究人员表示:“我们也有兴趣探索其他可能的材料,这样我们就可以对热和机械性能进行微调,这可能使我们能够定制执行器的速度和力量。”