
日本 SIT 的研究人员开发了一种基于电化学反应的传感器,该传感器可以平滑控制软机器人中的流体系统,实现不复杂的自我感应驱动,为小型化软机器人技术打开大门。图片来源:日本芝浦工业大学
而传统机器人的这些缺点恰恰是“软”机器人的优势所在。软机器人由称为弹性体的材料(具有高粘度和弹性的材料)制成,可以更好地吸收冲击,可以更好地适应环境,并且与传统机器人相比更安全。这允许广泛的应用,包括医学手术、日常操作和可穿戴技术方面。然而,这些软机器人中的许多都依赖于流体系统,这些系统仍然使用由机械部件(电机和轴承)操作的泵。结果,它们仍然沉重而嘈杂。
解决这个问题的一种方法是使用化学反应来驱动泵。但是,尽管此类系统绝对轻巧且安静,但它们的性能不如传统泵。有没有办法打破这种制约?事实证明,答案是肯定的。由日本芝浦工业大学 (SIT) 的一组研究人员介绍了一种利用电化学反应驱动泵的电流体动力 (EHD) 泵。EHD 泵具有由化学反应驱动泵的所有优点,并且没有任何问题。
在最近的一项研究中,研究团队已经迈出了更大一步,设计一种自感应 EHD 泵,该泵使用电化学双传感器 (ECDT) 来感应流体流动,进而激活电化学反应并增加电流。近来,自感应技术在软体机器人的小型化方面备受关注。在软体机器人中加入传感器增强了它们的多功能性,但往往会导致复杂的布线和臃肿。自感应驱动技术可以帮助解决这个问题,并使软体机器人小型化。
该团队基于他们之前设计的 EHD 泵进行 ECDT 设计。该泵由对称排列的平面电极组成,只需改变电压即可轻松控制流动方向。此外,由于两侧的电场强度相同,该布置能够实现无障碍流动,并且在每个方向上的流动量相同。
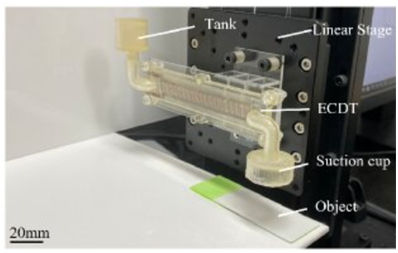
研究团队根据可检测流量、速率、灵敏度、响应和弛豫时间的范围评估传感性能,并使用数学模型来了解传感机制。ECDT 可以很容易地集成到流体系统中而不会出现膨胀或复杂性。此外,研究人员通过使用它来驱动吸盘来检测、抓取和释放物体来测试它的性能。
ECDT 的优势在于它的制造不需要任何特殊设备或复杂的加工工艺。此外,它体积小、重量轻,并且具有更高的灵敏度。