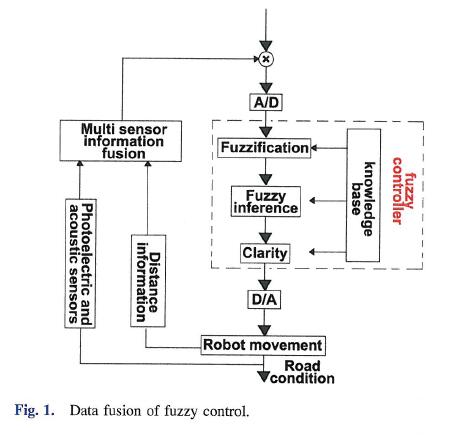
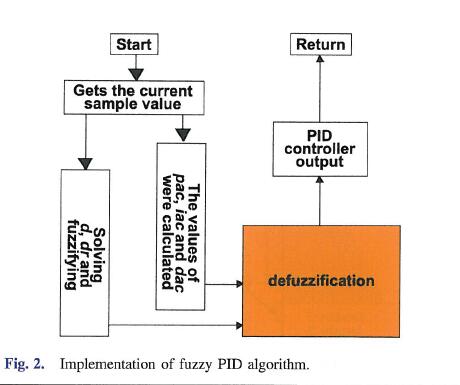
机器人的室内定位和自动充电技术是检验机器人智能控制的重要指标。利用声光传感器和光电传感器采集环境条件,基于模糊PID实现直流电机的闭环控制。该系统集成了多个光电传感器,采用高性能处理器S3C6410 ARM11代替PC机作为核心,降低了功耗和成本,从而完成测距信息的采集。获取环境图像进行图像处理。对接过程中采用红外对接方式,即充电座中的三根红外发射管发射不同的位置,并根据接收到的信号数量判断相对于充电座的位置。实验中,工业机器人的定位误差约为1%,能够满足室内定位的要求。自动充电对接成功率达98%以上,时间不超过65秒,满足自动充电要求。