
该研究结果于2021年12月15 日作为早期访问文章发表在 IEEE Xplore 上,并于本月发表在IEEE Sensors Journal上。该系统非常强大,可以测量每秒30摄氏度的温度变化,就像一个人如何迅速把手从被烧伤的威胁中抽出一样。
这种无线的、支持Wi-Fi的传感器可以在现实世界中有许多应用,从太空探索到外科手术——甚至在不久的将来创造出“热敏软机器人”。
这一功能可能有助于软机器人在搜索和救援、工业应用和太空探索中触摸热表面时采取相当于人类的退缩反射。在赋予机器人真正的触觉方面,这一功能使它们在复杂的环境中更加熟练。
虽然心理学家经常说视觉是人类从环境中获取信息的主要方式,但当视觉感知受损时,触觉感知是自然的求助手段。即使视觉没有受损,触觉也经常协同工作与视觉感知。这项工作的核心是所谓的GelSight传感器,它首先由麻省理工学院 (MIT) 的专家于 2009 年发明,它通过处理触摸信息提供任何表面的视觉 3D 详细形貌。然后通过传感器和摄像头根据触摸的内容提供数字反馈。
先前的研究表明,GelSight 传感器如何帮助机械臂更有效地抓握物体——这在机器人辅助手术中可能被证明是至关重要的。
研究人员使用简单的1英镑化妆垫(用于化妆的那种垫)创建了他们自己的超低成本GelSight传感器版本,这意味着技术对许多不同的领域都非常容易访问。
这项新研究的重点是调整GelSight传感器以应对极端高温。它是通过使用所谓的热致变色涂料做到这一点的,这种涂料会随着温度的变化而改变颜色,但一旦暴露在不同的温度下就会恢复正常。
不仅如此,这种新传感器还被改进到可以检测所有三种“触觉原色”——即力、温度和振动——例如能够记录某人的脉搏。
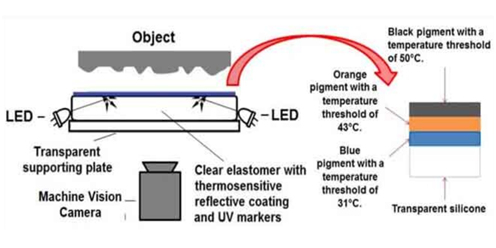
此外,研究人员证明了我们可以通过在反射涂层上使用不同颜色和不同温度阈值的热致变色颜料层,轻松地使用色调值来感知温度。
研究人员描述了传感器如何模拟相当于人类退缩反射的快速温度变化,这种热敏视觉触觉传感器是第一个单片弹性体温度传感器,可用于根据凝胶的机械变形推断触觉力。当暴露在高于50摄氏度的高温下时,传感器会迅速变色。研究人员能够测量出冷到热和热到冷的响应时间为 643 毫秒。我们的视觉触觉传感器的快速温度响应可与不到一秒的撤退反射响应相媲美。