
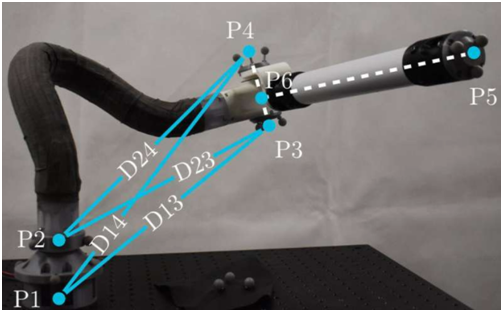
可锻臂大多是弯曲的,末端是刚性部分(P6-P5)
研究人员最近开发设计了一种可塑机械臂,人们可以通过使用增强现实(AR)眼镜来引导它成形。这种柔性臂可以向各个方向扭转和转动,这使得它很容易在制造、航天器维护、甚至损伤康复等方面进行定制化生产。
多功能机械臂不受僵硬的四肢和牢固的关节限制,可以很容易地弯曲成各种形状。在实践中,与机器人一起工作的人会手动将手臂弯曲成每项任务所需的精确形状,内部的聚酯薄膜层光滑,可以相互滑动并锁定到位,从而实现了一定程度的灵活性。然而,事实证明,在没有指导的情况下将机器人配置成特定的形状对用户来说很困难。
为了提高机器人的用户友好性,Imperial的REDS(机器人操作:工程、设计和科学)实验室的研究人员设计了一个系统,供用户在AR中查看如何配置他们的机器人。佩戴混合现实智能眼镜并通过运动跟踪摄像头,用户可以看到他们面前的模板和设计叠加到他们的现实世界环境中。然后他们调整机械臂,直到它与模板匹配,成功配置时模板变为绿色,以便机器人可以锁定到位。
研究人员表示:“调整这些机器人的关键问题之一是它们在新位置上的准确性。我们人类并不擅长确保新位置匹配模板,这就是我们向 AR 寻求帮助的原因。我们已经证明,AR 可以简化与我们的可塑性机器人一起工作。这种方法为用户提供了一系列易于创建的机器人位置,适用于各种应用,而无需太多的技术专长。”
研究人员在5名年龄在20至26岁之间具有机器人技术经验但没有专门操纵可塑性机器人经验的男性身上对该系统进行了测试。受试者能够准确地调整机器人,这一结果发表在《IEEE Robotics & Automation Magazine》上。
尽管参与者的范围很窄,但研究人员表示,他们的初步研究结果表明,在进一步的测试和用户培训之后,AR 可能是一种适应可塑性机器人的成功方法。
弯成形状
潜在应用包括制造、建筑和车辆维护。因为手臂很轻,它也可以用在首选轻重量仪器的航天器上。它也足够温和,可以用于损伤康复,帮助患者进行锻炼,而他们的物理治疗师进行另一次锻炼。在许多方面,它可以被视为分离的、更弯曲的第三只手臂。它可以在许多情况下提供帮助,因为额外的肢体可能会派上用场,并且有助于分散工作量。
研究人员仍在完善机器人及其 AR 组件的过程中。接下来,他们将考虑在AR中引入触摸和音频元素,以提高其配置机器人的准确性。
他们也在研究加强机器人。尽管它们的灵活性和柔软性使它们更易于配置,甚至可能更安全地与人类一起工作,但它们在锁定位置时的刚性较低,这可能会影响精度和准确性。