
01编者按
在国家芜湖机器人产业集聚区,芜湖市人民政府与安徽工程大学共同组建了安徽工程大学机器人产业研究院。该研究院专门从事机器人及智能装备研发与集成应用为一体的产学研相结合的高科技技术研究。其中研究院的项目团队研究移动机器人创新并突破了多个与之相关的关键性技术。研究全地形多用途移动机器人,开发可适应复杂环境,具备自主抉择的移动机器人平台。面向智能工厂和大规模智能物流应用场景,研究打造可调度8辆以上移动平台的5G云化物流系统。团队所研制的机器人,取得了省级成果登记,经组织专家鉴定,团队研究成果处于国内领先水平。
02背景与意义
移动机器人是工业机器人的一种,涉及的基本技术有传感器技术、信息处理技术、自动化控制技术、导航技术等。可用于智能制造复杂工况下的物流运输和户外环境下自主导航,有广泛的应用前景。
近日,由工业和信息化部、国家发展和改革委员会、科学技术部等15个部门正式印发了《“十四五”机器人产业发展规划》。其中移动机器人是提到的一项重要发展领域。机器人的研发、制造、应用是衡量一个国家科技创新和高端制造业水平的重要标志。移动机器人产业蓬勃发展,极大改变了人类生产和生活方式。在人工智能的背景下,移动机器人对社会的各个方面都有广泛的运用,尤其是生产制造业与仓储物流业。
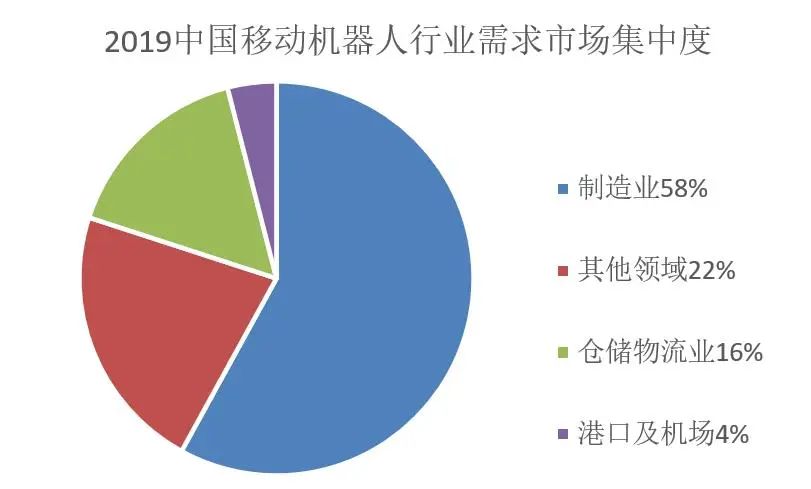
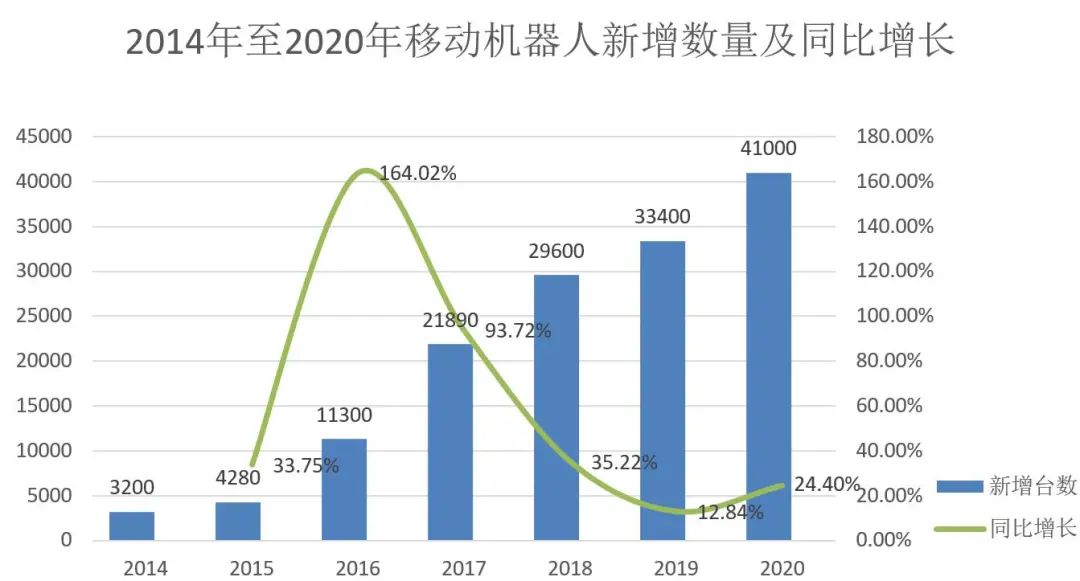
在国内需求方面,劳动力缺口促使人们对机器人技术产生了兴趣。根据中国移动机器人行业需求市场集中度调查显示,其中制造业占比最大为58%,仓储物流行业也占比16%。根据2014—2020年移动机器人新增数量及同比增长调查分析,自2014年以来我国移动机器人的安装数量快速上升。到2020年我国移动机器人新增数量达到4.1万台,同比增长24.4%。
随着移动机器人的市场需求以及应用领域不断扩大,对移动机器人的性能也提出了更高的要求。如何在地形复杂的环境下保持稳定性,如何构建复杂环境下与任务相适应的多传感器信息融合方法实现精准导航,如何实现多轴协同、多车多任务调度都是移动机器人研究中存在的技术难点。针对现如今移动机器人行业的技术难点,安徽工程大学机器人产业技术研究院汪步云团队就移动机器人多轴运动及调度系统、全向重载无人叉车多轴协同运动控制及调度系统共性等技术难点进行探索研究,并取得了关键性技术的突破。
03研究成果应用
安徽工程大学机器人产业技术研究院“智能机器人信息共融与协同控制”团队,研究了多用途移动机器人自主行走和智能化作业的理论和工程实践方法,开发了可有效应对复杂环境、具备自主决策的智能化移动作业平台,研制了具有标准接口的底层多轴运动控制器,构建复杂环境下与任务相适应的多传感器信息融合方法,突破了全向重载无人叉车多轴协同运动控制及调度系统共性关键技术。团队的研究成果取得了安徽省科技成果登记,并授权了多项专利以及计算机软件著作权。
成果应用1.全地形移动机器人平台
团队突破了移动机器人多轴运动控制及调度系统的共性关键性技术,创新研制了具有地形匹配的高精度组合导航的全地形移动机器人及其作业调度系统,实现了移动机器人在复杂的情况下自主进行作业。

成果应用2.调度系统
团队研发了上位机调度系统及其通用接口,开发了运动规划算法,为5G云服务平台提供接入端口并优化数据分发与储存协议,进一步提高调度系统的通用性、可靠性,为移动机器人提供通用的多任务调度系统。

全向重载AGV调度系统任务界面
工程应用1.全地形移动机器人及其户外自主导航
项目团队设计实现了全地形多用途的移动机器人多轴协同的高精度运动控制,所设计的底层控制器具备多种标准接口,研究冗余导航模式及运动控制算法,兼顾在结构环境下多种导航扩展接口,包括磁导航+RFID、惯导+二维码、SLAM激光定位,同时具备北斗导航/GPS+惯导户外自主导航模式,最大程度发挥移动机器人的灵活性、高效性,面向机动性和柔性调度要求较高的工厂和农村环境,打造物料输送、信息化采集等多场景应用的通用移动平台。

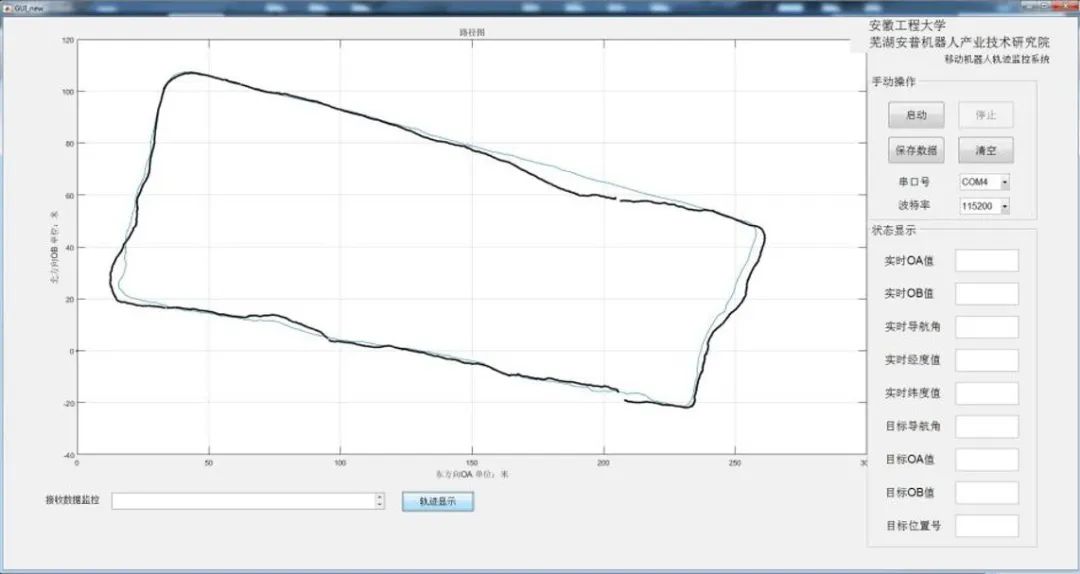
移动机器人北斗/GPS+惯导导航路测
户外地图匹配的移动机器人遥控操作


户外作业环境的数字地图重构与移动机器人路径规划
工程应用2.全向重载AGV多轴运动控制及其调度系统
针对AGV和叉车行业控制器通用化与调度系统多任务作业,依据AGV控制系统的特点,团队研发了全向重载AGV多轴运动控制及其调度系统。团队研究成果积极向AGV和叉车行业推广,在安徽合力股份有限公司-衡阳合力工业车辆有限公司开展了“平台起升移载全向AGV控制系统”示范应用,服务、改造传统行业向智能制造领域升级,提升该领域的智能化水平。技术成果在相关企业项目中获得应用,产生了良好的社会与经济效益,推动了移动机器人与智能制造交叉应用领域的技术创新发展。

无人叉车多轴运动控制及调度作业试验
04背后的科研
由汪步云博士带领的“智能机器人信息共融与协同控制” 创新团队,隶属安徽工程大学机器人产业技术研究院,专注于移动机器人以及无人叉车的技术研发。在研究全地形多用途移动机器人自主运行和智能化作业理论和工程实践方法的基础上,开发了可适应复杂环境,具备自主决策能力的移动机器人平台,研制了具有标准接口的底层运动控制器,构建复杂环境下与任务相适应的多传感器融合方法,实现了全地形移动机器人多轴协同的高精度运动控制,移动作业及多车多任务调度。研究大负载动态扰动下的移动平台非线性控制问题,设计多轴空间运动误差预估补偿算法,解决重载下高精度多轴协同的运动控制难题,满足云平台对底层执行高精度要求等。
★作者简介
汪步云,男,1984年出生,博士,安徽工程大学副教授,硕士生导师,安徽省技术领军人才、青年皖江学者、芜湖市战略性新兴产业优秀人才。2015年毕业于中国科学技术大学自动化系,获“控制科学与工程”专业博士学位。现为芜湖安普机器人产业技术研究院技术总监。主要研究方向为人机交互与智能机器人控制。主持国家自然科学基金1项,安徽省自然科学基金1项,安徽省重点研发计划1项,安徽省高校自然科学研究重大项目1项,芜湖市科技计划项目1项,安徽工程大学创新团队、科技成果转化引导基金、人才引进启动基金各1项;作为核心骨干成员参加完成了包括国家科技重大专项、国家“863”计划、国家自然科学基金在内国家级项目5项,参加完成了安徽省科技攻关、安徽省自然科学基金、安徽省重点研发计划、安徽省优秀青年基金和安徽省“115”产业创新团队各1项;主持企业横向项目20余项;主持教育部产学研协同育人项目1项,省级教研项目2项,校级重点教研项目2项,发表论文20余篇,其中SCI/EI收录10余篇,获发明专利授权12件,软件著作权11项,软件产品登记证书1项,发布企业标准2项,获安徽省机械工业二等奖2项。
在承担的科研项目中,带领团队,承担多项国家省市纵向科研项目,注重成果转化与实效;承担的企业横向课题,所开发系统受到用户好评。具有良好的团队管理、协调与组织能力。