
四足和两足机器人越来越受欢迎,其原因可能是寻找普通观众普遍参与的拟人化,虽然能够走到任何地方听起来像是一个令人兴奋的吸引力,但腿部的能量成本非常高。我们人类有腿,因为这是进化赋予我们的,但我们不敢创造腿车,因为我们知道这种骑行不会像轮式汽车那样舒适或节能。
这项研究的关键思路是,虽然腿使机器人更具相关性,赋予它们类似人类或动物的品质,但它们并不总是确保机器人快速有效地完成任务的最佳解决方案。因此,该团队没有开发具有单一运动机构的机器人,而是着手创建一个可以在不同机制之间切换的系统。
“环顾我们的家庭和工作场所,我们可以看到我们的环境95%是平坦的,最终有5%的不平坦地形,我们在空间之间'过渡'时需要面对,”研究人员表示:“考虑到这一点,为什么不开发一个系统,在这95%的情况下以'轮子状'的效率运行,特别是在剩下的5%的情况下过渡到较低的效率呢?”
该研究团队着手制造一种轮子,可以改变其配置以爬楼梯或绕过其他小障碍。为了实现这一目标,他们探索了“whegs”(即轮腿或翼腿)的概念,该概念已经存在了十多年,此后在机器人领域受到了相当大的关注。
在过去的几年中,开发和测试了几种轮腿系统。然而,这些系统中的大多数表现并不是特别好,主要是由于难以协调轮腿系统的左右两侧,当机器人爬楼梯时,轮腿系统需要完美对齐。
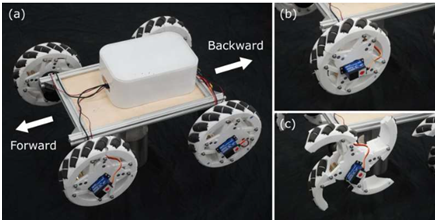
“为了解决通常与轮腿机构相关的协调问题,我们使用了全向轮,”研究人员表示:“这是拼图的最后一块,因为它使机器人能够在不旋转身体的情况下即时对齐。我们的机器人可以以非常低的能源成本向前、向后和向侧面移动,可以保持稳定位置,没有能量成本,并且可以在需要时快速爬楼梯。”
为了正常运行,研究团队创建的wheg系统需要为每个车轮增加一个伺服电机和一个简单的算法。除此之外,它的设计是基本和直接的,因此它可以很容易地被全球其他团队复制。
研究人员说:“这个系统的优点是如此丰富,而缺点是如此之少,以至于我们不禁认为它们对机器人领域看到的'腿机器人炒作'构成了威胁,任何最终需要爬楼梯的机器人应用都可以采用这种设计,特别是如果与机器人操纵器配对,在平坦的地面上奔跑时操纵物体,同时在爬楼梯时移动重心。”
研究人员在一系列实验中评估了他们的OmniWheg系统,重点是多种现实世界的室内场景,例如绕过障碍物,爬不同高度的台阶以及全方位转弯/移动。他们的结果非常有希望,因为他们的轮腿机器人可以成功克服所有常见的障碍,灵活有效地调整其配置以有效应对各个运动挑战。
未来,该研究团队创建的系统可以集成到现有和新的机器人中,以提高它们在室内环境中导航的效率。此外,该团队的工作可以激发基于全向车轮的类似wheg系统的开发。
研究人员表示:“我们的第一次设计迭代采用了相当'昂贵'的无刷电机,我们现在认为更轻的电机与齿轮减速配对会更有效,我们还计划在机器人的底座上添加一个机械手,这样就可以测试具有更高重心的上下楼梯的动力学。”