
香港大学的一组研究人员最近开发了一种新的软触觉传感器,可以让机器人检测它们所抓取物体的不同特性。该传感器在arXiv论坛上发表的一篇论文中介绍,它由两层编织光纤和自校准算法组成。
研究人员Wentao Chen和Youcan Yan表示:“尽管机器人应用中存在许多柔软且贴合的触觉传感器,能够将法向力和剪切力解耦,但接触物体的大小对力校准模型的影响通常被忽略了。利用接触力可以从软光纤芯中的光功率损耗中得出的原理,我们提出了一种软触觉传感器。通过设计嵌入软弹性体中的双层编织聚合物基光纤各向异性结构,该传感器可以解耦法向力和剪切力,并根据物体尺寸校准测量结果。”
从本质上讲,该团队提出的触觉传感器在向不同方向变形时会产生各向异性响应。然后通过线性校准算法处理此响应,该算法将光纤发射的信号直接映射到与传感器接触的物体的尺寸,并将力校准到物体的尺寸。
研究人员在一系列真实世界的实验中评估了他们的传感器并,将其集成在机械臂的尖端。在初步测试中,该传感器取得了良好的结果,因为它可以测量物体的大小以及根据物体尺寸校准的法向力和剪切力,而且精度很高。
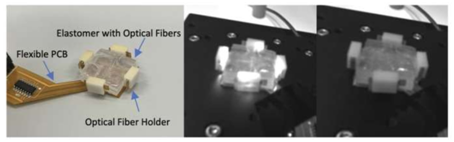
通过校准机械臂尖端的传感器,表明在所有方向0~2N的传感范围内,机器人可以以0.15N的法向力、0.17N的X轴剪切力和0.18N的Y轴剪切力的平均精度重建力向量,在5~12mm的测试压头直径范围内,物体尺寸测量的平均精度为0.4mm。结果突出了各向异性双层光纤结构和柔性PCB的硬件设计以及校准算法实现的精确测量。
与过去开发的其他人工触觉系统相比,新型软传感器不依赖于数据驱动的人工智能(AI)模型,这可能对计算要求很高,通常需要大量训练。这使得它更容易大规模实施,因为它的制造过程也相对容易且成本低廉。
未来,这种基于聚合物的新型传感器可以在更广泛的机器人上进行集成和测试,以进一步验证其现实性能。此外,研究人员正计划进一步改进其设计,例如通过包括额外的光纤层或以不同方式排列它们以解码额外的触觉信息。