
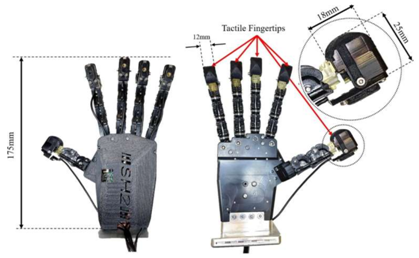
配备五个BRL TacTip指尖传感器的Pisa/IIT SoftHand
布里斯托尔机器人实验室(BRL)的灵巧机器人小组、比萨大学和印度理工学院的研究人员最近开发了一种触觉驱动系统,可以让机器人更轻柔、更有效地抓住各种物体。研究员在arXiv上的一篇论文中了介绍了该系统,它将一种能够实现力敏触摸的控制方案与一只指尖上都有光学触觉传感器的机械手相结合。
开发触觉系统的研究人员之一Chris Ford表示:“Pisa /IIT拥有基于人手的独特设计的机器人手(SoftHand)。我们希望将Pisa/IIT SoftHand和BRL TacTip触觉传感器结合起来,因为这两种技术由于其仿生性质而相辅相成。”
SoftHand是一种在形状和功能上都类似于人手的机械手。这只手最初是作为假肢工具开发的,可以像人手一样以相同的姿势协同抓握。
研究人员在SoftHand的每个指尖上集成了一个光学触觉传感器。他们使用了一种名为TacTip的传感器,该传感器可以从3D打印的触觉皮肤中提取信息,该皮肤的内部结构类似于人类皮肤的结构。他们下一步的工作目标是将系统更新版本与先进的控制框架相结合,以类似人类的、对力敏感的、温和的抓握。
新控制器通过测量SoftHand每个指尖上的柔软触觉皮肤的变形来工作。这种变形作为反馈信号,控制器使用该信号来调整手施加到其抓握物体上的力。
Ford解释道:“与控制电机电流等传统抓取控制方法相比,这是独一无二的,当将其应用于SoftHand等具有‘软’结构的抓握器时,这种方法可能会不准确。控制器的另一个独特功能是它使用来自5个高分辨率光学触觉传感器的反馈。光学触觉传感器使用相机来监测触觉皮肤的变化,由于其更高的分辨率,它们捕获了大量的触觉信息,图像的每个像素都是包含触觉信息的节点。对于1080p分辨率的触觉图像,这相当于超过200万个触觉节点。”
同时使用多个光学传感器通常需要大量的计算能力,因为一台计算机需要同时从不同的相机捕获高分辨率图像。为了减少计算负荷,研究人员开发了一个并行处理硬件“大脑”,可以同时从多个传感器收集图像。这极大地改善了他们的抓取控制器的反应时间,使其能够实现类似人类的性能。
这项工作的结果表明,我们可以从多个指尖获取接近人类触觉的复杂触觉信息,并将其整合为一个简单的反馈信号,可成功地对各种物体进行稳定、轻柔的抓握,无论几何形状和刚度,而不需要复杂的调整。
多个传感器的集成显着提高了研究人员基于SoftHand的机器人系统的触觉和传感能力。通过将其与并行处理硬件和精密控制器相结合,该团队还提高了以适当方式抓取不同类型物体的能力,并且不会出现与传感器数据处理相关的不良延迟。
未来,这种新型触觉驱动机器人系统可以集成到类人机器人上,使它们能够处理易碎或可变形的物体,同时与人类合作完成不同的任务。研究人员正在开发一些更复杂的方法来解决抓握的整体力量,并更准确地深入了解每个指尖接触的性质。最大限度地发挥这些传感器与拟人化手集成的潜力,使机器人的灵巧能力与人类相当。