
引自:《智能制造装备基础》(作者:吴玉厚、陈关龙、张珂、赵德宏、巩亚东、刘春时)
该书已出版,详细信息请见文末~
「 1. 搬运机器人的应用与发展 」
1)搬运机器人的功能
搬运作业是指用一种设备(或机器、装置)握持工件(或物品),使之从一种制造加工状态(或位置)移动到另一种制造加工状态(或位置)的过程。搬运机器人就是用于实现自动化搬运作业的工业机器人,广泛运用于化工、食品加工、包装物流行业等诸多领域,并向其他领域不断地延伸和发展。搬运机器人主要有以下优点:
(1)改善物流管理和调度的能力。
(2)满足柔性的场地要求和满足特殊工作环境需求。
(3)负载能力强。
(4)具有高动态特性,工作效率高;搬运精度高。
(5)简单经济、易维修、使用寿命长,一般寿命可达20年。
2)搬运机器人系统组成
搬运机器人是一个完整系统。以关节式搬运机器人为例(见图1),其工作站主要由操作机、控制系统、搬运系统(气体发生装置、真空发生装置和手爪等)和安全保护装置组成[1]。
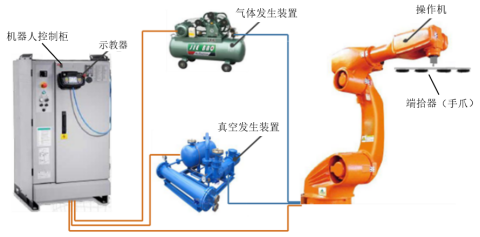
图1 搬运机器人系统组成
3)搬运机器人技术发展
搬运机器人技术是机器人技术、搬运技术和传感技术的融合。针对搬运机器人的开发会重点放于对其各项性能的完善上,主要体现的发展趋势如下:
(1)高负载。对于搬运机器人的承载能力要求会有较大提高,其所能承载的重量将会越来越大;如ABB公司推出的IRB 6660-100/3.3,就旨在解决坯件大、重、距离长等压机上下料的难题。
(2)高可靠性。在搬运机器人的工作过程中,其运行的稳定性十分重要,若是在工作过程中发生了较多的故障,极有可能导致搬运机器人将物料损坏;如日本FANUC公司推出的 FANUC R-2000iB,有紧凑的手腕结构、狭小的后部干涉区域、可高密度布置机构、高可靠性等特点。
(3)和谐的人机交互。搬运机器人愈加常见于人们的生活中,因此有必要提高搬运机器人与人类的交流,可以有效地提高效率。
(4)智能化。随着个性化需求和服务的增长,传统的制造模式将无法满足多样化生产的需求,需要升级到具有个性化定制能力的智能制造模式。不只是要求搬运机器人完成预定的工作,还要求搬运机器人根据环境的变化做出适当的反应;如FANUC公司推出的机器人控制柜R-30iA,内置视觉功能、散堆工件取出功能、故障诊断功能优点,可实现散堆工件搬运,一定程度上实现机器人的智能化与网络化。
「 2. 码垛机器人的应用与发展 」
1)码垛机器人的功能
码垛机器人是在物流生产线末端取代工人或码垛机完成工件自动码垛功能的设备,是机械与计算机程序有机结合的产物。码垛机器人能在工业生产过程中实现大批量工件、包装件的快速获取、搬运、装箱、堆垛、拆垛等作业,是可以集成在生产线上任意阶段的高新机电产品。码垛机器人主要有以下优点:
(1)结构简单、故障率低、性能可靠、保养维修方便;占地面积少,操作范围大。
(2)适应性强,可根据不同的产品类型和实际需求进行编程来满足需求。
(3)智能程度高,可根据设定的信息对货物进行识别,送至不同位置。
(4)操作简单,可在控制柜屏幕上操作,示教方法简单易懂。
(5)能耗低,码垛机功率在26kW左右,而码垛机器人功率仅为5kW左右。
2)码垛机器人系统组成
如图2所示,码垛机器人系统主要由操作机、控制系统、码垛系统(气体发生装置、液压发生装置)和安全保护装置组成。

图2 码垛机器人系统组成
3)码垛机器人技术发展
在全球生产制造最大利益化趋势下,码垛逐渐成为各个企业生产的瓶颈。为了能够适应不断变化的商品对于码垛的要求,让码垛机器人尽可能更好地服务工业生产,必须解决限制码垛机器人技术发展的因素,针对码垛机器人的新功能、新特点进行创新和发展,使得整个包装物流业逐渐向“自动化、无人化”发展。码垛机器人未来主要发展趋势如下:
(1)自动化程度不断提高。机电综合技术将会成为码垛机器人发展的主流,码垛机器人自动化主要包括自动控制和自动检测,微电子、红外线、传感器等新技术,尤其是微小型计算机的广泛使用会使码垛机器人的自动控制和自动检测水平飞速提升,从而大大提高码垛质量。
(2)模块集成化。采用模块化结构不仅能够让码垛机器人最大限度地满足不同物品对机器人的要求,同时可以让设备的设计和制造更方便,能够降低成本、缩短生产周期。如KUKA 公司的KRC4控制器将安全控制、机器人控制、运动控制、逻辑控制及工艺控制集中在一个开放高效数据标准构架中,具有高性能、可升级和灵活性等特点,实现了机器人部分的模块集成。
(3)功能多样化。近年来由于多品种、小批量商品市场的不断壮大以及中、小型用户的急剧增加,多功能通用码垛机器人的发展速度越来越快,应用前景也十分开阔。
(4)高速化。不仅要促进单机高速化,而且要提高码垛系统的高速化;在不断提升自动化程度的前提下,不断改进码垛机器人的结构,让整个码垛系统的高速化向更深的层次发展。如ABB公司推出的全球最快码垛机器人IRB-460,操作节拍可到达2190次/h,运行速度比常规机器人提升15%。
「 3. 焊接机器人的应用与发展 」
1)焊接机器人的功能
焊接机器人是替代人类从事焊接(包括切割与喷涂)的工业机器人。焊接机器人集焊接技术、计算机控制、数控加工等多种知识领域于一体,在制造业中的应用数量逐年增加,焊接机器人的使用可以提高焊接生产效率,改善工作人员的劳动条件,稳定和保证产品质量,易于实现产品的差异化生产,并能够推动相关产业自动化升级改造。通常所说的焊接机器人包括:点焊机器人、弧焊机器人、激光焊接机器人、搅拌摩擦焊接机器人、等离子焊接机器人等,其中点焊、弧焊和激光焊接机器人应用比较普遍。焊接机器人主要有以下优点:
(1)稳定和提高焊接质量,保证其均匀性。采用机器人焊接时,每条焊缝的焊接参数都是恒定的,焊缝质量受人为因素影响较小,焊接质量稳定。
(2)改善了劳动条件,提高了劳动生产率。采用机器人焊接,工人只需要装卸工件,远离了焊接弧光、烟雾和飞溅等有害环境,使工人从高强度的体力劳动中解脱出来,并且实现24小时连续生产。
(3)产品周期明确,容易控制产品产量。
2)焊接机器人系统组成
根据焊接工艺的不同,焊接机器人的系统组成也略有不同,基本可以分为机器人系统和焊接系统两部分,具体点焊机器人、弧焊机器人、激光焊接机器人系统组成分别如图3~图5所示。
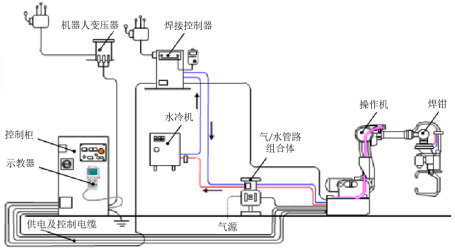
图3 点焊机器人系统组成
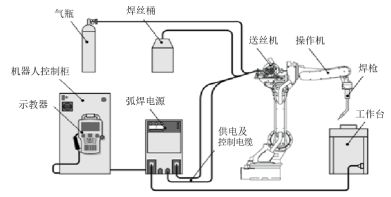
图4 弧焊机器人系统组成
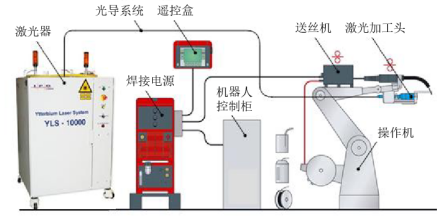
图5 激光焊接机器人系统组成
3)焊接机器人技术发展
焊接是一个高度非线性、多变量、多种不确定因素作用的过程,使得控制焊缝成形质量极为困难,机器人焊接领域的发展需要采用计算机技术、控制技术、信息和传感技术、人工智能等多学科知识,实现焊接电源静动特性的无级控制、焊接初始位置的自主识别、焊缝实时跟踪、焊接熔池动态特征信息获取、焊接参数自适应调节等,以确保焊接质量和提高焊接效率。
焊接机器人未来主要发展趋势如下:
(1)智能化水平更高。未来焊接机器人需要提高对加工模式及工作环境的识别能力,能够及时发现问题并提出解决方案加以实施,创建能够从有限的数据中快速学习的系统。
(2)离线编程仿真技术应用更广。目前使用的示教再现编程耗时长,机器人长期处于空置状态,影响加工效率。离线编程及计算机仿真技术将工艺分析、程序编制、工艺调整等工作集中于离线操作,不影响焊接机器人的正常生产,这将在提高生产率方面起到积极的作用。
(3)向基于PC机的通用型控制转变。焊接机器人已经开始从之前特定的控制器控制向基于PC机的通用型控制转变,从而把声音识别、图像处理、人工智能等一系列研究成果更好地应用于实际工程生产中。
(4)多智能焊接机器人调控技术应用。在工业上可以根据生产需要将各种功能的机器人组装成一个群组加工平台,更适用于流水线式生产操作;如YASKAWA公司推出的机器人控制柜可以协调控制多达72个轴,更好地为群组作业服务。
(5)焊接技术更加柔性化、网络化。将各种光、机、电技术与焊接技术有机结合,以实现焊接的精密化和柔性化;如FANUC公司的R-0iA与林肯新型弧焊电源之间实现了数字通讯,网络化水平更高。
「 4. 装配机器人的应用与发展 」
1)装配机器人的功能
装配机器人是工业生产中用于装配生产线上对零件或部件进行装配的一类工业机器人。装配机器人作为柔性自动化装配作业线的核心设备,在不同装配生产线上发挥着强大的装配作用。装配机器人主要有以下优点:
(1)操作速度快,加速性能好,缩短工作循环时间。
(2)精度高,具有极高的重复定位精度,保证装配精度。
(3)能够实时调节生产节拍和末端执行器的动作状态;可以通过更换不同的末端执行器来适应装配任务的变化,方便快捷。
(4)柔顺性好,能够与零件供给器、输送装置等辅助设备集成,能与其他系统配套使用,实现柔性化生产。
(5)多带有视觉传感器、触觉传感器、接近度传感器和力传感器等,大大提高了装配机器人的作业性能和环境适应性,保证装配任务的精准性。
2)装配机器人系统组成
装配机器人由装配系统和机器人系统两部分组成(见图6),其中装配系统主要包括:操作机、控制系统、装配系统(手爪、气体发生装置、真空发生装置或电动装置)、传感系统和安全保护装置[2]。
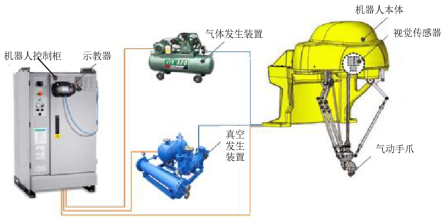
图6 装配机器人系统组成
3)装配机器人技术发展
装配机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的自动化装备,已成为柔性制造系统、自动化工厂、计算机集成制造系统中代表性的自动化设备,经过长时间的发展,装配机器人正逐步实现柔性化、无人化、一体化装配工作。
装配机器人未来主要发展趋势如下:
(1)操作机结构的优化设计:探索新的高强度轻质材料,进一步提高负载/自重比,同时机构进一步向着模块化、可重构方向发展;如日本川田工业株式会社推出的 NEXTAGE 装配机器人具有15个轴,打破机器人定点安装的局限,机器人底部配有移动导向轮,可适应不同结构的装配生产线。
(2)直接驱动装配机器人:传统机器人减速装置中的传动链会增加系统功耗,产生惯量、误差等,并降低系统可靠性,采用高扭矩低速电机直接驱动可避免此种问题。
(3)多传感器融合技术:为进一步提高机器人的智能和适应性,多种传感器融合是关键;如YASKAWA机器人公司推出的双臂机器人SDA10F,具有15个轴,并配备VGA CCD 摄像头,极大地促进了装配准确性。
(4)机器人遥控及监控技术:通过网络建立大范围内的机器人遥控系统,在有时延的情况下,建立预先显示进行遥控等。
(5)虚拟机器人技术:基于多传感器、多媒体和虚拟现实以及临场感技术,实现机器人的虚拟遥控操作和人机交互。
(6)并联机器人应用范围扩大:传统机器人采用连杆和关节串联结构,而并联机器人执行机构的分布得到改善,可减少非累积定位误差,和奇异位置数量。
(7)多智能体协调控制技术:这是目前机器人研究的一个崭新领域,是对多智能体的群体体系结构、相互间的通信与磋商机理、感知与学习方法、建模和规划、群体行为控制等方面进行研究;同时,也要关注同一机器人双臂的协作,以及人与机器人的协作。
参考文献
[1]车娟,江明棠. 基于PLC和KUKA机器人的棒材车削自动生产线的设计[J]. 内燃机与配件,2017(22):22-23.
[2]任婷婷. 自动化生产线的安装与调试[J]. 电子技术与软件工程,2018(3):145-146.