
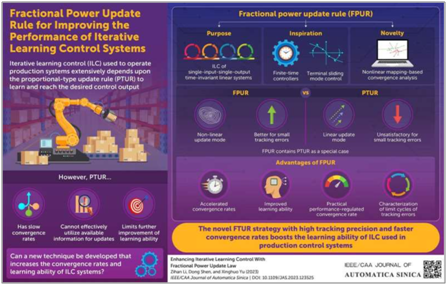
使用新的分数阶幂更新规则(FPUR)提高了迭代学习系统(ILC)的收敛性。图片说明:与传统使用的比例型更新规则(PTUR)相比,新的FPUR允许ILC更快、更有效地学习。
然而,这种控制方法是几十年前提出的。由于ILC系统越来越多地被用于执行更复杂的任务,因此需要能够更快、更准确地学习的技术。
在最近的一项突破中,一组科学家提出了一种新技术,该技术使用分数幂更新规则 (FPUR) 来增强单输入单输出线性ILC系统的性能潜力。该研究已发表在IEEE/CAA Journal of Automatica Sinica上。
收敛率——期望输出与实际输出之间的差异随时间减小的速率——在定义 ILC 系统的效率方面起着至关重要的作用。在需要高精度的情况下,现有的提高收敛速度的方法往往不能令人满意。即使在恒定或手动选择学习增益的情况下,当前使用线性更新方法的 ILC 系统也无法充分利用可用信息。因此,科学家们研究了 PTUR 之外的方法,这些方法利用非线性更新方法来学习并达到所需的输出。
传统的 PTUR 使用跟踪误差的线性项来更新控制输入。另一方面,FPUR 使用分数项进行更新。由于任何小于1的正数都具有比其本身更大的分数次幂,因此FPUR的更新强度对于小的跟踪误差,它比PTUR更大,从而导致更快的收敛速度。
该团队开发了一种新的FPUR方法,其灵感来自较新的有限时间控制 (FTC) 和终端滑模控制 (TSMC) 策略,这些策略是克服上述问题和提高收敛速度的潜在技术。科学家们还采用了非线性映射方法来探索随时间变化的误差动态。这种方法使他们能够报告快速收敛性能并描述 ILC 系统中跟踪误差的可能极限循环。此外,还进行了数值模拟以验证新方法的有效性。
当被问及所提出的系统将如何改变ILC系统领域时,这项研究有三个主要目的。首先,它提供了一种使用非线性更新方法来提高学习能力的算法。其次,它表明适应分数幂项允许根据实际性能调节收敛速度。最后,它表现出与 FTC 和 TMSC 相当的 快速收敛速度。
这项研究首次展示了在单输入单输出线性系统中使用FPUR进行 ILC。所提出的技术可能会用于其他重复系统,例如自动驾驶汽车、无人机和康复机器人。