
随着机器人市场快速发展,多种多样的机器人相继问世,多种类型的机器人协同作业的应用需求不断扩大,其优势和价值不断被市场认可。与此同时,市场也开始对具备混合调度能力的机器人管理系统提出更高需求和期望。本文分析了多种机器人协作的发展与行业典型应用,以及多种机器人混合调度的优势、面临的挑战与技术要点。机遇与挑战并存的多种机器人混合调度,必将成为新的趋势和亮点。
本文作者:肖晓清 刘明(南通羲和软件科技有限公司)
近些年,机器人市场以前所未有的速度迅猛发展,越来越多的终端客户部署了基于机器人的解决方案,随着机器人厂家和机器人种类层出不穷,使得这个市场愈发繁荣和活跃, “黑灯工厂”呼之欲出。终端客户不断享受着智能科技带来的改变。然而,在终端客户持续拓展机器人部署和应用时,一个至关重要的应用需求和趋势渐渐浮现——多种机器人协同作业。
一、多种机器人协作概念与发展
多种机器人协同作业,不单指多个同种类机器人协同作业,也不单指多个协作机器人,而是指在一个任务中,由不同类型的机器人(例如:无人叉车、搬运AGV、机械臂等)协同工作来完成任务的过程。这些机器人之间通过通信和协作来共同实现任务目标。
《“十四五”机器人产业发展规划》关于机器人核心技术攻关行动中提到的“共性技术”,就包含了多种机器人协同作业技术,其重要性不言而喻。
随着机器人产业不断快速发展,机器人的应用覆盖率也随之增长,市场慢慢发现,一种机器人已经无法满足同一场地丰富的自动化的需求,进一步催生多种机器人协作的产生。例如,在制造业中,一个产品需要经过多个环节才能完成生产,每个环节都需要特定的机器人进行加工作业。
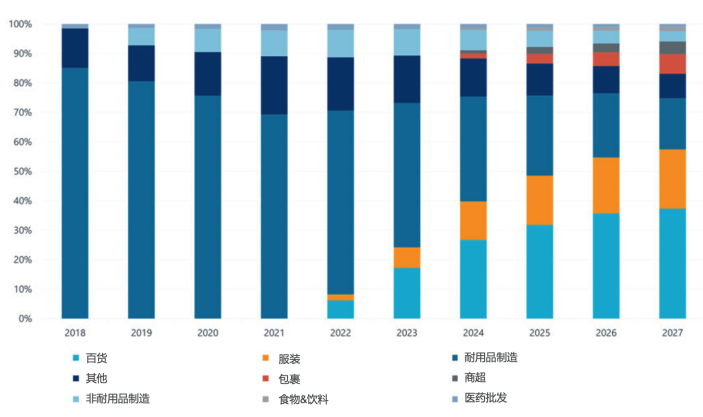
图1 多种机器人调度平台在不同行业占比
来自Interact Analysis的报告预测,AMR多种机器人混合调度市场预计2021年至2027年间的复合年均增长率为138%。如图1所示,多种机器人协作在各个行业都有广泛应用,目前耐用品制造行业占主要部分。可见混合调度市场发展增速之快,范围之广。其发展过程,在某种程度上与WCS(仓库控制软件)的发展历史部分相似。在固定自动化的早期,出现了大量的“自动化孤岛”, 如图2所示,当仓库开始同时使用多种类型的固定自动化时, WMS必须将任务传达给多个子控制系统,导致效率低下,因为子系统之间没有进行通信。因此,我们看到可以与多种类型的固定自动化技术对接的WCS解决方案的出现,允许跨不同子系统进行一定程度的编排。
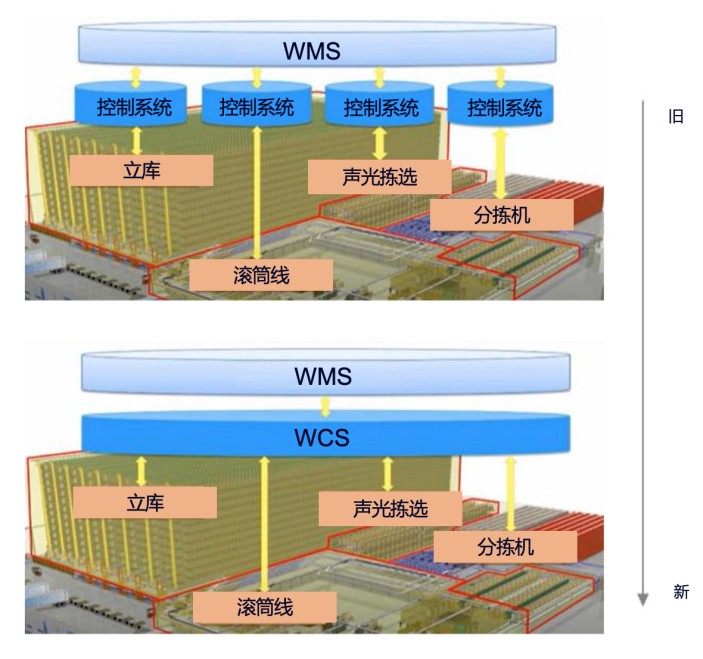
图2 WCS的发展
二、行业典型应用分析
随着机器人应用解决方案的普及和不断迭代,多种机器人协同作业已经在各行各业得到实际落地并取得显著成果。接下来,我们将详细分析一些典型应用案例。
1.堆高叉车、双向穿梭车和地面托盘搬运车,在托盘高密度存取和搬运场景的优化应用
例如,一些终端客户,已经在其工厂或仓库部署了基于穿梭车的穿梭式货架,用人工遥控穿梭车+人工叉车来实现货物存取,由于穿梭车只能在一个巷道来回穿梭,换巷道就需要通过人工叉车来将穿梭车搬运到不同巷道口。随着无人堆高叉车的引进,通过统一的调度,利用无人叉车和穿梭车配合(如图3),实现了此道工序的无人自动化。无人叉车和穿梭车都由统一的调度系统来对接和控制,实现了两种类型车型无缝协同作业,包括其充电的时机都能以最佳方式协调,对于上位系统,如WMS,只需将要存取的货架信息发给调度系统,由调度系统分别下发任务给叉车和穿梭车来完成,并反馈最终状态给上游系统。上游系统信息收集和反馈也实现自动化,并且非常易于集成。

图3 叉车+穿梭车混合调度
但实际运行一段时间后,我们会发现,堆高叉车在长距离搬运环节的优势并不高,体现为几方面:1.成本高;2.体积大;3.速度不够快,转弯不够灵活;4.人机混行安全性低。因此,单纯使用堆高叉车,在成本、效率和安全上,有可能都无法满足客户降本增效的需求。
为此,继续利用多种机器人协同作业的思路,对这一解决方案进行优化,引入成本更低、体积更小、专注搬运的地面托盘搬运机器人,例如潜伏机器人、类地牛机器人等,实现长距离搬运的低成本、高效和安全性。利用穿梭车实现高密度存储,利用堆高车的功能特性实现高位的存取,利用地面搬运机器人实现高效转运。可见,结合不同品牌种类机器人,将它们有机结合而成的解决方案,可以实现1+1>2的效果,并且可以不断柔性扩展,组合千变万化。
2.移动机器人与固定位机器人搭配
例如,在工厂中,使用按钮来触发事件,下发任务至机器人执行特定任务,使用多色灯来反馈任务执行状态。对于不同工序,使用不同上装的机器人,如移动机器人上装滚筒工装搬运料箱等载具,可与滚筒线对接,如果不同点的滚筒线有高低差,可以使用带有升降装置的滚筒上装。对于有抓取的工序,可以将机械臂安装在移动机器人上前往指定工位作业。移动机器人工装可以按工序需求任意搭载。当然,也可以让移动机器人移动载具与固定位机器人对接处理。比如固定位的机械臂将货物装载到托盘上,再由移动机器人搬运到指定位置。移动机器人移动过程中,可以自动与自动门、电梯交互实现跨楼层;与固定位的承重装置实现重量自动测量;与固定位的包装机交互,实现自动包装等。移动机器人与固定位机器人的丰富组合,可以满足工厂物流等复杂的工序需求。
3.场景解决方案混合使用
例如,仓库中可使用高密度存储解决方案(如四向穿梭车高密度货架)结合“货到人”解决方案(潜伏机器人+潜伏货架),来提高“货到人”解决方案的存储密度,通过四向穿梭车与潜伏车接驳,来转运货架到拣选工作站。在拣货工作站,人工将商品拣选到笼车等载具中,再由搬运机器人搬运至机器人分拨系统,对商品进行自动化分拨。通过组合不同机器人的解决方案,来实现系统的更高能力。
4.其他
多种机器人协同作业的应用很多,并且会层出不穷。基本思路是利用多种机器人在功能、载重、大小、性能、导航类型、成本、品牌等维度的不同优势,进行最优化组合,实现最佳解决方案。如立体运动机器人(爬货架机器人等)结合地面机器人,实现高密度存取和搬运。利用超高位的料箱机器人结合潜伏搬运机器人,设置组合式货架、高位使用料箱货架、低位使用潜伏货架,实现混合存储的上存下拣解决方案。再例如,利用高位料箱车和地面转运料箱车搭配来代替多背篓料箱车的解决方案,从而提高料箱存储密度和降低成本。
三、多种机器人混合调度的优势
随着客户对机器人解决方案的深入接触和了解,越来越多客户开始意识到多种机器人协同作业的价值和重要性,多种机器人混合调度的需求随之激增,其价值和优势主要体现在以下几个方面:
1.丰富解决方案
随着机器人行业迅猛发展,为各种场景设计的应用型机器人层出不穷。客户通过使用混合调度技术,可灵活搭配不同类型的机器人使用,集各家之所长,来实现原本一家供应商无法实现的特定应用场景。
2.降本增效
往往一家供应商能提供的机器人种类有限,通过多种机器人混合部署,客户可以选择从多家供应商采购,并选用各品牌最具性价比的机型,从而降低采购成本。同时选择最适合的机型,避免“杀鸡用宰牛刀”,从而进一步提高作业效率,达到降本增效的目的。
3.自主可控
客户可以自由更换机器人,随时添加所需机器人,随时改变布局和流程,以满足企业发展中不同阶段的需求。
4.高效对接和扩展
客户只需对接一套混合调度系统,即可持续扩展和部署机器人应用,无需与多个供应商的调度系统重复对接,并可降低学习和维护成本。
5.打破信息孤岛
混合调度可以促进信息共享,通过使用先进的算法进行路径规划和统一分配,使得每个任务都被分配给最合适的机器人,并且各个任务流程之间保持最佳的协调,从而提高现场运行的稳定性和效率。
6.提高空间利用率
与固定位置的机器人相比,移动机器人最大的区别是空间共享问题,即交通管控。混合调度可以通过实现统一的交通管控来避免机器人之间的交通死锁和碰撞。这个方法可以让不同机器人在同一个区域内协同工作,从而显著提高空间利用率。
四、面临的挑战
多种机器人混合调度的优势显而易见,但同时也面临着多种挑战。
1.控制权和开放度
机器人管理系统之间无法兼容,但交通管控只能由单个系统来完成,当遇到需要协同作业的场景,就涉及用谁家系统来控制的问题。
供应商往往都有自己专属的机器人管理系统,并且视为其核心知识产权,往往只开放机器人管理系统的API,且更倾向于提供更全面的机型覆盖和更全面的解决方案给客户,从而导致供应商不愿开放机器人API。
2.责任边界
由于会有多个品牌机器人和调度系统供应商参与,在部署和运维过程中如果遇到问题,需要多个供应商分析和定位,并确定最终由谁来解决问题。机器人协作的背后,也是考验不同供应商之间的支持与协作。
3.接口标准
各家机器人接口都是按自己最适合的方式实现,标准不统一,不兼容,互操作性差,市场还没有形成完全统一的标准。虽然有欧洲发布的VDA5050标准、美国发布的Mass Robotics、中国发布的《工业应用移动机器人与其调度系统数据的接口规范》等,但是这些标准仍然在普及的过程中。
4.系统架构和算法
考虑到各种机器人的集成,并且不同场景中应用方式方法各不相同。这就对混合调度系统的架构和算法以及功能等提出更高要求。需要充分考虑任务分配、路径规划、交通管控、动作编排等等功能的高效性和灵活度,才能使多种机器人协作真正达到1+1>2的目的。
五、技术要点
1.地图融合
地图融合是指将各家供应商专有的地图数据结构或其他公开标准的地图结构,通过地图坐标转换技术,将地图的坐标类型、偏移、旋转角度、缩放比例、度量单位等,按标准统一转置,进而将各家地图映射到统一的地图格式上,并提供用户统一的编辑和规划界面。
2.可插拔平台
对于混合调度技术,需要适配多种机器人、自动化设备、第三方系统和应用场景。适配越来越多的种类,可以提供客户丰富的组合和选择。当种类越来越多,管理这些代码也会变成灾难。传统的代码分支管理软件,无法针对如此多的功能进行很好的代码版本管理。同时,针对单个项目,将所有适配的功能都发布上去,会造成系统的低效和不稳定。此时,类似中国古代活字印刷术的可插拔插件平台技术完美地解决了这个问题(如图4)。例如,某个项目只使用了3种车型,2个自动化设备,2种应用场景。此时只需将这7个插件部署到该项目上,并且如果其中一个插件要升级,或者需要做功能修复,也只需替换这一个插件。这将大大降低管理难度,提高系统的效率和稳定性。同时配合插件二次开发功能,使得客户能自主开发其所需功能,大大提高客户自主可控性。
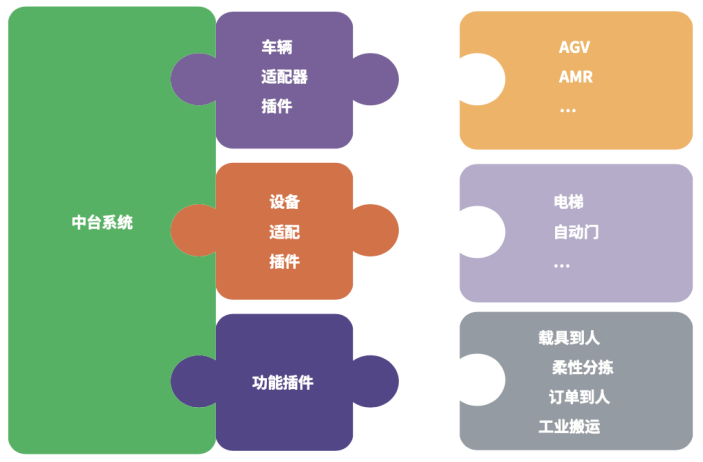
图4 可插拔插件化平台
3.万物互联
将混合调度技术发挥到极限,需要全面的“万物”互联(如图5),包括上游系统、自动化设备、机器人等,将“万物”信息打通,统一协调,发挥混合调度最大优势。
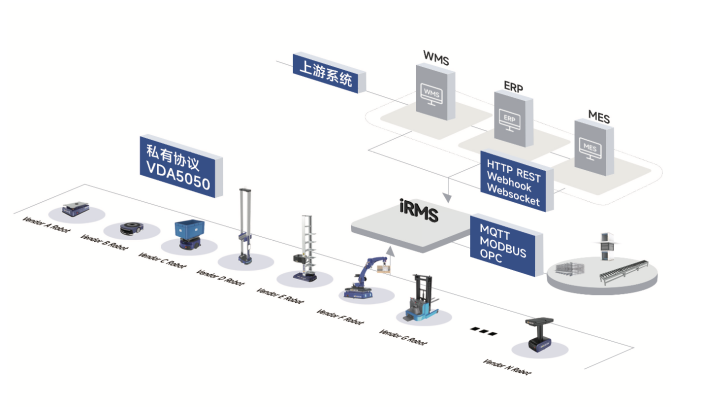
图5 万物互联
4.混用
除了不同类型和品牌的机器人混用,还需支持以下维度的混用:
(1)充电策略混用
为了提高充电桩的复用率,减少空间占用。需针对不同机器人使用不同的充电策略,比如满充周期、最佳充放电区间、低电量判断规则、充电曲线、温度监控,等等,保证多种机器人充电效率最优化。
(2)休息策略混用
通过算法和策略,来实现不同机器人对休息空间的最大化利用率。比如,有些机器人可以在货架底下休息,有些则需要按队列化排列休息FIFO,FILO等。针对不同机型使用不同休息策略,使得效率和空间使用率最优化。
(3)场景混用
往往一个场地存在多种不同应用场景,比如物流配置中心,需要搬运、分拣、存取等不同场景灵活组合搭配。混合调度需要能够满足不同场景的功能需要,才能实现一套系统整体控制,打破信息孤岛,体现混合调度的优势。
5.无代码&低代码
混合调度带来多变的组合,随之而来的是丰富的解决方案。同时柔性自动化更是移动机器人为市场带来的又一大亮点。并且可以感受到,固定流程的部署,无法满足实际客户的需要,因为场地经常由于工序等原因,需要变更布局、流程,甚至增减设备等。那么,柔性化、自主化、易用化,就成了客户最迫切的需求。
通过提供无代码或低代码的功能,实现多机混跑任务简单快速的重新编排,来满足客户需求,实现易用易学易部署,缩短部署周期,提高部署后的稳定性。
6.智能算法
算法是多种机器人混合调度的基础,优秀的算法可以保证系统运行的稳定性,同时带来1+1>2的效率提升。从大的层面来看,一般涉及任务分配算法、路径规划算法、交通管控算法、充电策略算法、停车策略算法、取放货顺序算法等等(如图6)。随着AI技术不断发展,结合AI的智能算法将会是核心竞争力。
图6 智能算法
7.仿真模拟
在决定采购机器人和设备之前,先通过1:1参数的虚拟机器人在仿真平台上验证方案的可行性,找出瓶颈,得出相对最优解和最佳组合,进而采购和快速上线部署。混合调度仿真模拟,如图7。
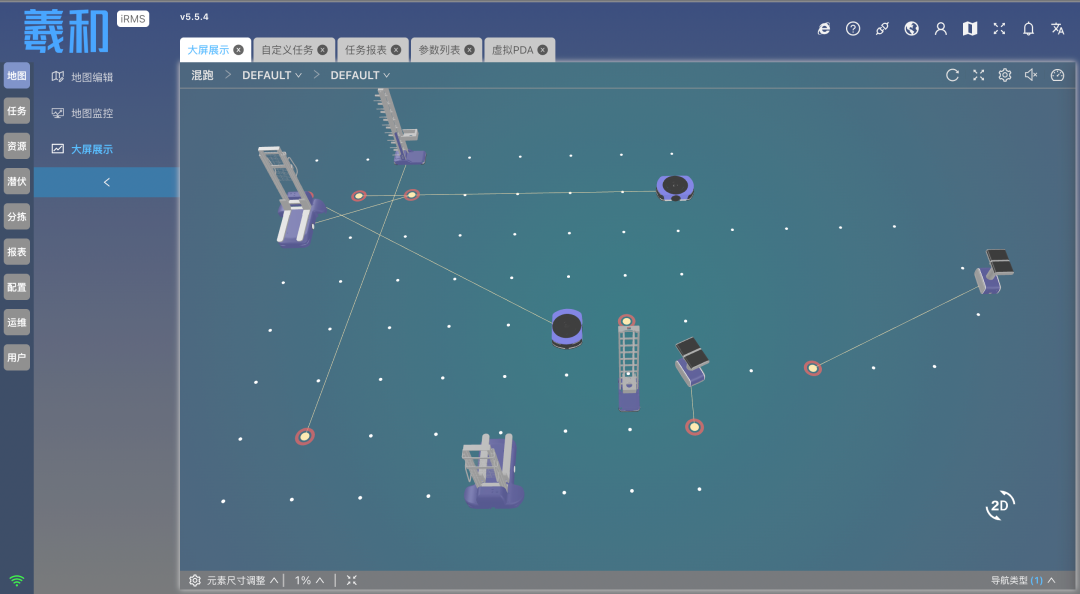
图7 混合调度仿真模拟
六、混合调度供应商
1.机器人主控改造类
将同一品牌主控模块安装到不同品牌机器人本体,适配和控制机器人的各种零部件,来实现导航、定位和运动控制等,结合自有的机器人调度系统,实现对不同机器人本体的统一控制和调度。代表公司主要有:仙工、科聪、宾通、凤源、科尔摩根NDC、BlueBotics等。
2.机器人协议适配类
适配机器人的公有或私有协议,来实现对不同品牌多种机器人的混合调度。代表公司主要有:羲和、威联加、壹悟、ProfControl、Synaos、Meili Robots、Freedom Robotics、Waku Robotics、Movizon、SVT Robotics等。
例如,专注从事机器人混合调度系统研发的南通羲和软件科技有限公司,其最新一代智能机器人管理系统 iRMS,支持全场景多种机器人混合调度技术。该系统宣称100%开放,通过标准化产品为客户赋能,助力客户自主部署多种机器人混合调度解决方案。其自研的可插拔模块化平台,提供客户丰富的功能插件,并支持客户自主二次开发。搭配先进的拖拽式无代码平台和OEM定制功能,即刻打造属于客户自己的高自主、低成本、低门槛、易学、易用、易部署的机器人管理系统平台。此外,iRMS还支持与各种自动化设备对接,实现万物互联。精心设计的接口方便上游系统(如WMS、MES、ERP等)快速接入。支持通过机器人供应商专属协议和VDA5050等公有协议来对接机器人。另外,搭配使用其自研的3D仿真模拟系统iSimulator,1:1还原最真实的运行效果,提前验证方案,确定布局和需购买的资源种类和数量等,可实现最大化降本增效。