
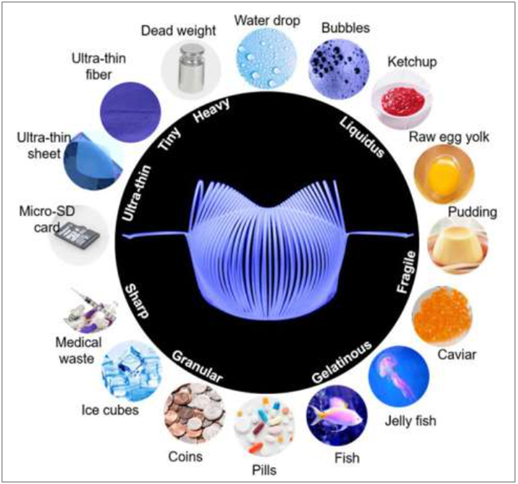
新型机器人夹具可以处理大量不同的物体
除了制造业应用之外,研究人员还将该设备与技术相集成,允许通过前臂肌肉产生的电信号控制夹具,展示了其与机器人假肢一起使用的潜力。
由于强度、精度和温和性之间的权衡,很难开发出一种能够处理超软、超薄和重物体的单一软夹具,该设计实现了这些特性的完美平衡。
新型夹具的设计基于上一代灵活的机器人夹具,借鉴了剪纸艺术,其中涉及切割和折叠二维材料片以形成三维形状。
该团队研制的新夹具也使用剪纸,但有很大不同,因为研究人员从以前的设计中学到了很多经验,已经能够改进基本结构本身,以及夹具的轨迹,即夹具在抓取物体时接近物体的路径。新设计能够实现高度的强度和柔和性,因为它如何在整个夹具结构中分配力。
机器人夹具的强度通常以有效负载重量比来衡量,这一夹具重0.4克,可举起6.4公斤。有效载荷重量比约为16,000。这比之前的有效载荷重量比记录(6,400)高出2.5倍。具有柔和以及精确的特性,夹具的强度表明其具有广泛的应用范围。
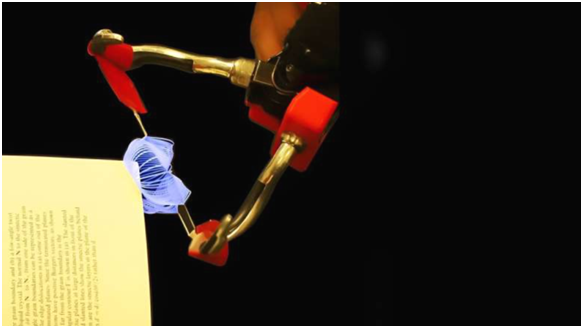
机器人夹具可以翻书页
这项新技术的另一个好处是,其吸引人的特性主要是由其结构设计驱动的,而不是由用于制造夹具的材料驱动的。这意味着你可以用可生物降解的材料(例如坚固的植物叶子)制造夹具,这对于您只想在有限时间内使用夹具的应用特别有用,例如在处理食品或生物医学材料时。我们已经证明夹具可用于处理锋利的医疗材料废物,例如针头。
研究人员还将抓取装置与肌电假手集成在一起,这意味着假肢是通过肌肉活动来控制的。这种夹具为使用现有假肢设备难以执行的任务提供了增强功能,例如拉上某些类型的拉链、捡起硬币等。新的抓手不能取代现有假手的所有功能,但它可以用来补充其他功能,剪纸夹具的优点之一是,您无需更换或增强机器人假肢中使用的现有电机。在使用夹具时,您可以简单地利用现有电机。
在概念验证测试中,研究人员证明剪纸夹具可以与肌电假肢结合使用,以翻书页并从藤蔓上摘下葡萄。夹具设计在机器人假肢、食品加工、制药和电子制造等领域具有广泛的应用前景。