
自动化中的一个常见问题是拾取随机放置在料仓中的零件。由于随机拣选零件需要复杂的视觉和机器人技术,因此这一操作通常由人工操作。机器人更擅长将零件放在一致的地方,做到每次都能精准一致地拣选。
当机器人需要在随机位置和方向上拣选各种不同的部件时,它就需要一个视觉系统,并且需要一个3D视觉系统。这些系统需要对复杂的视觉应用进行编程,并集成复杂的机器人应用程序。柯马推出的智能视觉辅助拣选解决方案MI.RA/OnePicker有望改变这一难题。

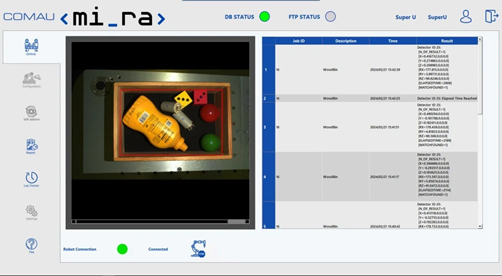
柯马的MI.RA/OnePicker人工智能视觉系统
MI.RA/OnePicker专为从同一料箱中自动随机抓取各种物体而设计,无需依赖基于CAD的协助(视觉辅助拣选)或事先知道尺寸、形状、颜色或特性方面的信息,是提高生产率、工人安全和总体效率的明智选择。
柯马的新型零件拣选解决方案受到人工智能支持,集最尖端的视觉技术与先进的传感器为一体,可检测和定位随机放置的物体,并主动确定清空料箱的最有效方法。
由于MI.RA/OnePicker可确保无与伦比的精度和生产率,因此减少了对手动和重复操作的需求,同时节省了时间和成本。
机器人路径规划
在大多数机器人应用程序中,是由程序员设定好机器人拾取物品的路径和放置位置。然而,在智能自动分拣系统中,机器人需要先规划拾取物品的路径。MI.RA/OnePicker 解决方案可在虚拟仿真工具的帮助下规划路径,提供无碰撞轨迹,有效帮助减少不必要的动作和总时间周期。
MI.RA/OnePicker 解决方案可实现随机物体的自主拾取
3D机器人引导
视觉引导系统可能相当复杂,需要数月的时间积累,但它们可以帮助机器人挑选复杂的形状并提高挑选精度。通常,视觉系统的开发环境与机器人不同,因此需要对齐坐标系,并且数据需要在机器人和摄像头之间来回传递。
为了减少这种复杂的拓扑结构,柯马付出了巨大的努力,其设置工具为用户提供了所有必要的参数。使用MI.RA/OnePicker,用户只需输入参数,算法就会使用这些参数来定义机器人路径和抓取位置。柯马还提供了一套预定义程序,其中包括常用场景,使集成过程更轻松。合并功能还允许用户将现有的机器人程序与现成的程序合并。