
先进的触觉技术
在操控机器人进行抓取/抓握时,触觉技术是指结合精细控制和感知物体及其特性的技术,通过施加适当的力量,在不造成损坏的情况下进行适当的互动。从本质上讲,触觉技术包含模仿人类触觉灵敏度的设备和概念。
要将触觉技术融入机器人系统(无论是用于手术期间操纵人体组织还是在工业设施中拾取/处理物体和零件),必须在其设计中纳入以下几个元素:
l 触觉传感器(即电阻式、电容式或压电式)通常集成到机器人末端执行器(例如手或夹持器)中,以检测压力、温度和/或温度。
l 在处理特定物体时,力反馈系统提供了对物体施加力量的衡量标准,并传递了用于抓握调整的实时数据。
l 通常采用基于机器学习的算法来处理感官输入,使机器人能够学习、调整其灵活性并长期优化性能。
l 执行器有助于执行运动指令,高精度模型可为复杂的任务提供精细而灵巧的控制。
双指机械手
一个国际合作研究小组设计了一种具有两根手指的机械手,每根手指具有两个自由度,使用低成本传感器,这种传感器比机械手夹持器更灵活,比其他机械手技术更简单。
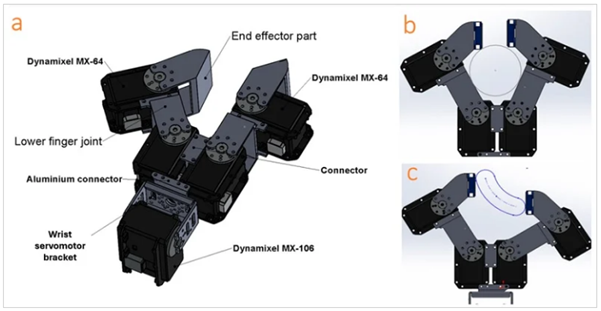
该团队采用了一种新颖的方法,将融合力敏电阻(FSR)传感器与伺服电机平均电流相结合,以提高抓握速度和精度。FSR传感器集成到每个指尖中,以增强灵敏度和物体检测能力。
研究团队采用独特的阻抗控制算法来调节机器人手的刚度和阻尼。集成质量弹簧阻尼系统用于通过处理伺服电机电流值(根据刚度等不同的物体特性而有所不同)来模拟阻抗控制,以调整夹持压力。物体的刚度分类发生在闭合和加载阶段。关闭阶段代表与所选实验对象的初始接触和完整的触摸感觉,而加载阶段代表机器人抓取对象。
研究团队对每个物体(苹果、软球、玻璃杯、塑料杯、小包牛奶和空汽水罐)进行了十次抓取测试。在60次的测试中,机械手成功抓握并举起选定物体,且没有造成任何伤害或滑落。机械手利用伺服电机电流差异成功确定物体的刚度,从而实现自定义的力和方向。在成功率、抓握力和位置方面,机械手都要优于基准手,并减少了滑落和断裂。这些特点凸显了双指机械手在提高外科手术准确性、假肢功能和自动化工业流程效率方面的潜力。
暗影之手(Shadow Hand)
在另一个案例中,谷歌的DeepMind(Alphabet的子公司)与Shadow Robot合作开发了一只智能灵巧的机械手,用于机器人灵活性相关的人工智能研究。

暗影之手具有极强的弹性,能够承受剧烈的力量和冲击。该机械手非常适合长期运行的机器学习技术,用于训练软件做出最佳决策。虽然该机械手坚固性的具体细节尚不清楚,但其可以承受反复碰撞和剧烈使用。
暗影之手配备完整的远程操作系统集成、故障保险和分步关闭方法。指尖内的传感器采用立体摄像头技术,为用户提供详细的3D视觉设置。位置控制环支持指尖灵活性,持续的惯性和扭矩测量也为手部提供了对环境的最佳灵敏度。
DeepMind并不是唯一一个在机器人操作方面取得进步的前瞻性团队。OpenAI也在使用暗影之手训练机器人,以完成高度灵活的任务,扩展现代机器人抓握和灵巧控制的界限。