
长期以来,机器人一直被用于处理核事故和退役发电厂的放射性物质。随着远程控制设备和防护设计方面的不断进步,机器人应用被推向了新高度,最近的两次演示就是例证。
其中一个案例研究涉及从日本福岛第一核电站的反应堆中清除放射性碎片,而另一个案例研究则涉及美国正在测试用于核清理的混合现实遥控机器人系统

福岛核事故发生13年后,机器人协助清理工作
东京电力公司(TEPCO)正在部署遥控机器人,从福岛第一核电站2号机组中取出熔化的燃料碎片。该设施自2011年地震和随后的海啸以后,一直处于关闭状态,导致三座反应堆的冷却系统瘫痪。对于2号机组,东京电力无法通过插入控制棒来关闭反应堆,而毗邻建筑物的氢气爆炸进一步损坏了反应堆的墙壁,使遏制变得更加困难。
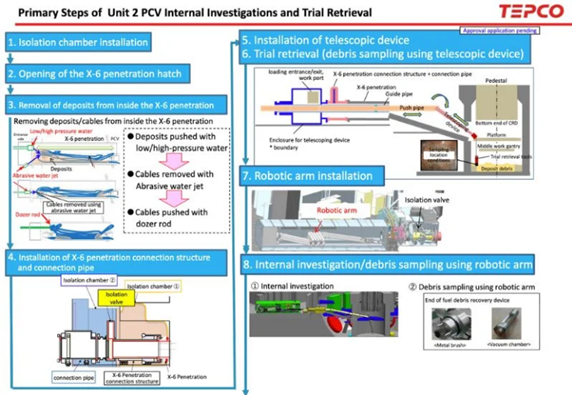
十多年后,东京电力计划使用抗辐射机器人移除三座反应堆内约880吨的熔化燃料。多年来,东京电力一直忙于从3号和4号机组中回收乏燃料,并调查1号和2号机组的损坏情况,以及拆除和重建工厂部分设施以进行下一步的清理活动。今年晚些时候,该公司将首次使用可伸缩管道机器人进入2号机组的主安全壳,开始清除放射性燃料碎片。
在扩大规模以用于未来的退役工作前,该机器只移除不到3克的物质。东京电力公司上个月演示了这一过程,将机器人从管道中放下,然后捡起了一块碎片。
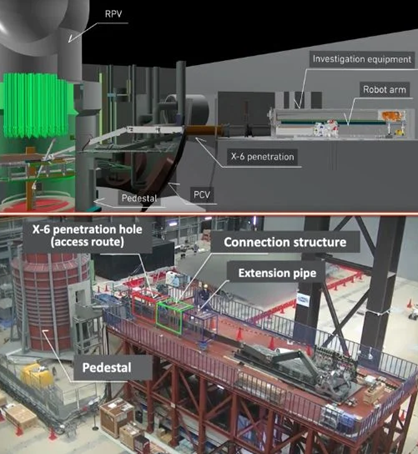
2号机组的回收计划包括插入一根72英尺长、4.6吨重的高强度不锈钢和铝制臂,其路径与之前调查时使用伸缩臂的路径相同。
钳状延伸臂将使用金属刷和真空容器收集细小沉积物。该臂设计为穿过圆柱形结构延伸至反应堆基座底部。延伸管插入东京电力公司安装的替代轨道以代替控制棒驱动装置。在臂下方,导管用作轨道的坡道。然后,机器人通过倾斜动作进入或进出路线。
国家实验室测试数字孪生遥控机器人
在美国,阿贡国家实验室已经展示了一种用于处理热室内放射性物质的遥控机器人系统。

在橡树岭国家实验室放射化学处理场的非放射性模拟环境中,该测试持续了一周的时间。一个灵巧的双臂机器人成功打开了一个危险材料罐,检查并分类了其中的物质,然后关闭了容器。在方向盘后面,一名人类操作员通过虚拟现实耳机和触觉手套引导机器的动作。
此次演示使用了阿贡的混合现实数字孪生平台。该平台结合了传感显示器、虚拟模型和硬件控制,形成有形物体的数字表示。在这种情况下,操作员在数字工作站远程控制机器人的手臂。
阿贡国家实验室称,该技术可以取代传统的放射性物质处理方法。从历史上看,处理过程依赖于热室,而热室由屏蔽混凝土和可通过密封手套箱操作的机械操纵器组成。然而,这些技术依赖于过时的手动设备,很难在现场部署。
阿贡的遥控机器人解决方案用过由增强设备和数字孪生软件控制的移动热室系统解决了这些问题。在对热室结构进行一些技术改进后,该实验室计划在今年晚些时候进行另一次演示。
一旦完成,该机器人预计将帮助美国能源部清理107个核电站。