
香港城市大学和香港科技大学的生物医学、机械和航空航天工程师团队通过将弹簧加载的伸缩腿连接到四轴飞行器的底部,开发了一种跳跃机器人。其研究成果发布在《科学机器人(science Robotics)》杂志上。
近年来,四轴飞行器逐渐流行,可用于公众娱乐、监视审查和研究。此类飞行器可以实现前所未有的空中观察,有时还可以运载有效载荷。
飞行机器人通常需要改进的两个问题是飞行时间和有效负载能力,而该团队研究设计了一种方案对这两个方面进行改进。该方案包括在标准四轴飞行器下放添加弹簧加载的伸缩腿(本质上是弹簧单高跷),使四轴飞行器在必要时能够跳跃。此外,研究人员还增加了稳定功能,确保伸缩腿能够正常工作。
增加跳跃能力可以减少电池消耗,从而实现更长的飞行时间。此外,通过跳跃还可以使飞行器无需保持高空飞行,允许其举起更重的负载。
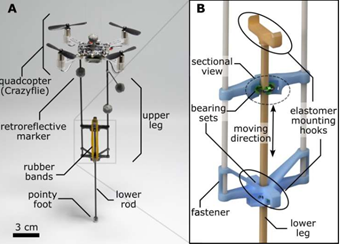
研究人员通过视频介绍了混合跳跃和飞行机器人。该机器人可以在空中和地面运动模式之间无缝转换。混合运动为机器人提供了更高的敏捷性和耐力。当配备空气动力稳定器时,机器人能够在不需要位置反馈的情况下执行户外操作。
研究人员发现机器人可以根据需要进行跳跃,轻松地从一个位置移动到另一个位置,还可以进行中跳飞行,然后像普通的四轴飞行器一样飞行。测试表明,除了垂直跳跃外,机器人还能在不平坦的地面上跳跃,甚至可以水平跳跃,这意味着伸缩腿可以用作保险杠,防止机器人撞到墙壁或其他结构时造成损坏。
研究人员将他们的机器人设定为鸟大小,重量轻,约为35克。在可能的实际应用中,研究人员建议用于监测野生动物;也可用于灾区,帮助评估和寻找幸存者;或者用于农场监测,测试土壤和湿度水平。