
正如在ANYmal、Lynx和Go2等机器人上看到的那样,拥有刚性背部的四足机器人不仅可以用来拖运设备,而且也相当灵活。但如果它们需要挤进狭小的空间,比如爬进烟囱内部,那么一定的灵活性也会很有作用。
东京大学实验室的科学家们不仅带来了解剖学上正确的肌肉骨骼机器人、飞行龙(flying DRAGON)和人形司机,还推出了一种背部有关节的机器狗,它可以完成这样的任务,并且可以轻松地进入不同高度的地形。
腰部关节意味着机器人背部可以略微拱起,以缩短机器人的长度,或者弯曲背部以在复杂的环境中导航。JSK团队没有在脚部末端安装抓手或爪子来帮助KLEIYN机器狗抓住不平的垂直表面并克服重力,而是选择让腿部关节对相对光滑墙壁施加足够的压力,以保持机器人在空中飞行。
每条腿都有三个自由度,并在“肩部”和后部“膝盖”处设有一个俯仰轴关节。所有腿部关节均配备减速比为1:10且扭矩为25牛·米(18.4磅英尺)的执行器。Go2和Lynx等机器狗的两个“小腿”关节朝向相同,而JSK机器人的两个“小腿”关节则朝向相反,以便在不影响其行走姿态的情况下更好地与脚垫垂直接触。
腰部关节具有一个自由度,减速比为1:9,与40牛·米(29.5磅英尺)的电机啮合。它连接到相同的铝制车身箱体上,箱体内部装有电池和车载电脑等组件——一个位于车头,顶部是内置IMU的激光雷达装置;另一个位于车尾。
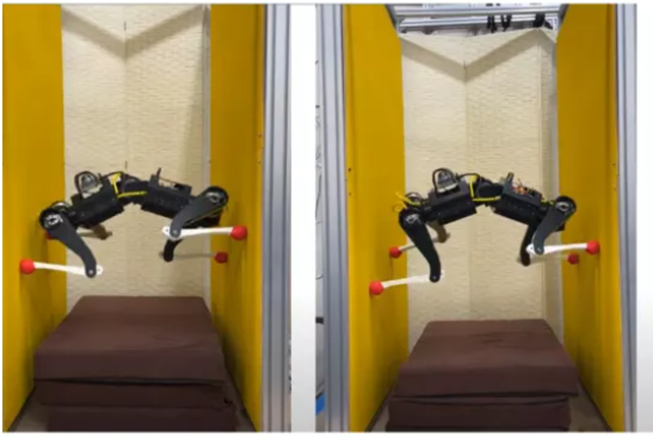
研究人员采用了一种名为“接触引导课程学习”(Contact-Guided Curriculum Learning)的新型强化学习平台,为这只四足机器人提供从站立姿势掌握爬烟囱技能所需的虚拟体验。在虚拟空间进行训练后,团队竖起了两块胶合板,形成三组墙壁,每组墙壁之间的间隙宽度分别为800毫米、900毫米和1000毫米。
随后,四足机器人接到了攀爬指令。在800毫米的间隙中,该机器人的攀爬速度高达每秒170毫米,团队表示,这比加州大学洛杉矶分校的RoMeLa SiLVIA六足机器人快50倍,后者的攀爬速度据称为每秒3毫米。团队还测试了其常规运动、爬楼梯和在不平坦路面上行走。
KLEIYN机器狗重13公斤(28.6磅),高400毫米(15.7英寸),直体长760毫米(约30英寸)。工业巡检的实际应用相当明显,但搜救行动也可能受益于这种多功能设计和虚拟学习平台。