
几十年来,机器人一直是制造业的核心力量,但它们大多局限于单一用途,只能在高度控制的环境中运行。早期的智能机器人尝试往往未能兑现承诺,但如今,随着人工智能(尤其是基础模型和视觉语言模型)的进步,机器人正突破传统限制,迈向通用自主性。
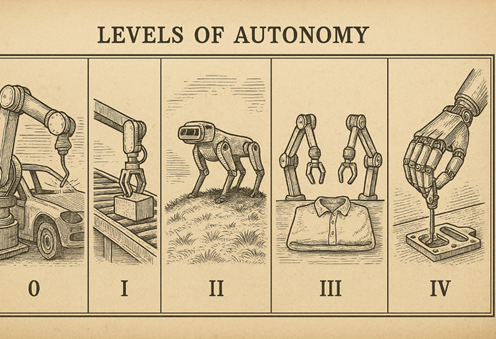
2025年,SemiAnalysis团队提出了首个行业标准化的“机器人自主性分级体系”,将机器人划分为5个级别(0-4级),每个级别代表不同的能力、应用和经济可行性。这一框架不仅帮助行业理解当前技术发展阶段,也为未来的机器人部署提供了战略指导。
•0级:脚本运动(Scripted Motion)
•1级:智能抓取与放置(Intelligent Pick & Place)
•2级:自主移动(Autonomous Mobility)
•3级:低技能操作(Low-skill Manipulation)
•4级:力控精细任务(Force-dependent Tasks)
一、机器人自主性分级体系
(一)0级:脚本运动——机器人完全是预编程的,需要静态环境和任务才能运行
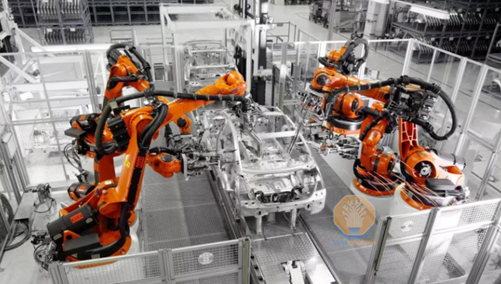
典型场景:汽车焊接、电子组装等高度重复性任务
核心能力:24×7高速自动化,单台节拍秒级,精度±0.02mm
面临挑战:
l 完全依赖预编程指令,无环境感知能力
l 零自主性——任何异常必须停机等人
l 环境零容错——围栏、光栅、地面定位孔
l 高门槛——资本密集,中小工厂被排除
经济影响:在汽车制造等领域已实现高回报,但仅限于资本密集型行业
(二)1级:智能抓取与放置——AI第一次商业化试水(2015–2024)

典型场景:物流分拣(如亚马逊仓库)
核心能力:可识别不同位置的物体并进行分类抓取
面临挑战:
l 感知泛化能力有限(如透明物体、杂乱环境)
l 商业可行性高度依赖任务类型(包裹分拣可行,高混合拣选仍困难)
技术突破:算机视觉(如YOLO、Mask R-CNN)提升了物体识别能力
(三)2级:自主移动——“会走路的眼睛”走进工地与油厂

典型场景:
l 建筑巡检——替代8小时人工巡检,减少人工费用
l 石油设施监测——防爆四足,可减少停工损失
l 关键基础设施检查——免停机检查,可减少停机损失
核心能力:可在开放环境中导航,执行长期任务
技术支撑:
l SLAM(同步定位与建图)+VLM(视觉语言模型)实现高阶规划
l 四足机器人(如波士顿动力Spot)成为主流形态
面临挑战:复杂地形(如深泥、玻璃地面)仍难以应对
(四)3级:低技能操作——“移动+手”组合打开劳动替代闸门
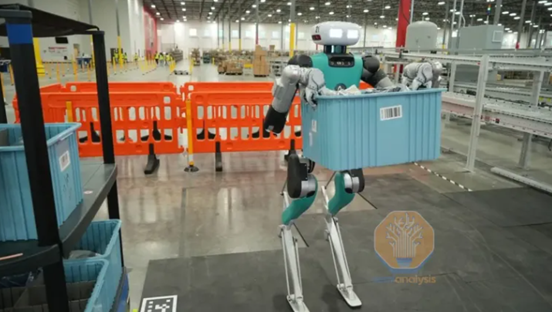
把2级的“移动”与1级“抓取”相结合,就形成了移动操作(Mobile Manipulation)。
典型场景:餐饮服务、工业洗衣、物流库存管理
核心能力:可执行基本物体操作(如折叠衣物、简单烹饪)
关键技术:
l VLA(视觉-语言-动作模型) 实现端到端任务分解
l 远程操作(Teleoperation)降低部署门槛
经济模式:机器人即服务(RaaS)兴起,按小时计费
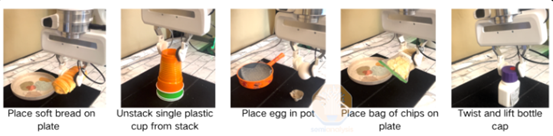
(五)4级:力控精细任务——最后20%劳动力的终结者
典型场景:
l 高技能工种——配管、装灯、精密装配
l 服务业全流程——酒店铺床、零售补货、老人陪护
l 极端环境——核退役、太空基地建设
核心能力:可执行精细操作(如拧螺丝、口袋中找手机)
关键技术:触觉传感、力反馈、sim2real(模拟到现实)优化
经济冲击:全球12–15亿体力劳动岗位中,4级可自动化90%;首个国家/企业实现Level 4规模化,将掌握“劳动力出口”定价权
未来影响:自动化技术工种(管道、电气维修);可能引发劳动力市场颠覆性变革
二、关键技术驱动力
机器人自主性的快速演进主要得益于三大技术突破。基础模型的崛起彻底改变了机器人的认知能力,特别是视觉语言模型(VLM)和视觉-语言-动作模型(VLA)的发展,使机器人能够像人类一样进行多模态推理和任务分解。这些模型通过海量互联网数据的训练,赋予了机器人理解复杂指令、进行空间推理和环境感知的能力。仿真训练技术的进步则解决了机器人学习中的数据瓶颈问题,高保真的虚拟环境让机器人可以在数小时内积累相当于现实世界数年的操作经验,大幅缩小了"模拟到现实"(sim2real)的差距。在硬件层面,更高效的执行器设计让机器人动作更加精准流畅,而能量密度更高的电池则延长了工作续航,触觉传感器的成本下降更是为Level 4的力控操作奠定了基础。
三、行业应用现状
当前各行业的机器人应用呈现出明显的层级特征。制造业仍是Level 0机器人的主要阵地,汽车工厂里数以千计的机械臂以惊人的精度完成焊接、喷涂等重复工作。物流仓储领域则见证了Level 1机器人的崛起,智能分拣系统正在改变传统仓库的运营模式。在能源和基建行业,Level 2的自主移动机器人展现出独特价值,四足机器人可以深入危险区域执行巡检任务,大幅降低了人工风险。最引人注目的是Level 3机器人在服务业的渗透,从餐厅后厨的烹饪机器人到酒店洗衣房的折叠系统,这些具备基本操作能力的机器人正在重塑低技能劳动力市场。值得注意的是,各行业的应用深度与机器人成本、任务复杂度密切相关,形成了鲜明的技术-市场匹配图谱。
四、未来十年趋势展望
未来十年,机器人技术将沿着三个关键维度持续突破。技术层面,Level 3-4机器人的商业化进程将加速,预计到2030年,具备精细操作能力的机器人将规模化替代仓储、清洁等领域的低技能岗位。产品形态上,双足机器人的稳定性和实用性将显著提升,使其能够适应更复杂的人类环境,逐步进入家庭服务和医疗护理等场景。而最大的变革可能发生在社会经济层面,当Level 4机器人成熟时,全球劳动力市场将面临结构性重构,这既会带来生产力跃升,也会引发就业结构剧变。政策制定者需要未雨绸缪,建立适应机器人时代的监管框架,特别是在责任认定、数据隐私和职业培训等方面。这些趋势的交织影响,将决定未来人机协作的社会图景。