
凭借配套的基础设施来实现共享移动性,到2030年美国自动驾驶汽车(AV)的行驶里程可达5000亿英里,约占美国汽车里程总数的9%。到2040年,AV能占所有行驶里程的50%。除了减少交通堵塞,自动驾驶车辆也使得汽车尾气排放量、运输死亡率下降,以前专门用于停车的建筑可以重新用于商业或住宅。这些改进结合在一起,每年可产生总计8500亿美元的经济效益。
随着AV成为主要的交通方式,道路等基础设施也需要改善。但这个问题现在得到的关注相对较少,因为公司、投资者、发明家和政策制定者都将注意力集中在与AVs本身相关的安全等问题上。然而,在进行资本规划时,利益相关者将很快开始更详细地讨论AV基础设施需求。他们现在所做的一些决定,可能会决定共享自主流动(SAM)能否获得吸引力。
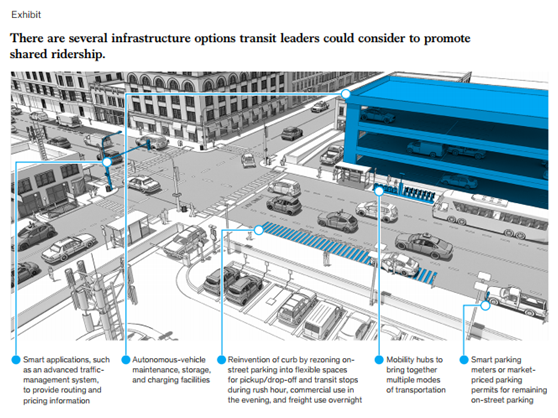
为了帮助交通官员考虑未来的道路,麦肯锡为AV基础设施确定了一条潜在路径,使SAM成为可能。它包括促进AV增长的基本结构和道路改造计划,以及特别针对鼓励共享机动性的改进。交通领导者可以考虑分阶段的方法,首先在AV试点期间实施一些基础设施的变化,然后作出额外的调整,以适应混合交通(AVs和传统汽车),最后创建基础设施,支持完全过渡到AVs。
为了使未来的州具备良好的基础设施,政府官员可以确定潜在的交通改善是否会促进SAM的发展,无论是对现有的AVs还是未来的完全自主模式。如果他们现在就考虑SAM来设计结构,以后就不需要进行昂贵的改造。其他需要考虑的相关问题包括道路收费、分区、许可证和保险。
随着公共部门考虑潜在的基础设施升级,监测AV技术的变化将非常重要。最近,关于利益相关者应该在车辆到基础设施(V2I)系统上投资多少的争论越来越多,如道路上的传感器和向AVs发送信号的路标。对于哪种V2I技术是最合适的,业界也有很多争论,对于专用短程通信(DSRC)和蜂窝车辆对一切(C-V2X)系统的竞争优势,意见也存在分歧。虽然评估特定的V2I技术超出了本文的范围,但是注意到V2I生态系统的快速增长是很重要的(尽管汽车原始设备制造商正在试验配备车载传感器和动态地图的AVs,使它们能够独立运行)。如果公共部门领导人把这些潜在的技术变革牢记在心,他们就会对基础设施做出明智的决定。
根据国际粗糙度指数的评分,美国只有41%的道路满足良好行驶的要求。坑洼、剥落不良和其他维护问题不仅造成安全问题,而且对AVs提出了挑战。如果各国政府考虑采取更快、更有效的方法来改善基本基础设施,它们就能减少这些问题。除了改善安全性和降低与车辆磨损有关的成本外,它们的基础设施投资还将使AV试点试验成为可能。
即使进行了初步的维修,道路维修仍将是一个主要和持续的问题。不断恶化的道路不仅是人类司机的麻烦,它们也是自动驾驶汽车的主要障碍。为了促进更高层次的自治,地图软件必须对困难的十字路口高度精确。为了避免由于自动驾驶汽车变得越来越普遍而出现的问题,交通官员可以考虑进行比传统做法更为系统的维修。官员们还可能考虑与地图公司结成伙伴关系,以确保在进行必要的维修时,以成本效益高的方式快速更新高清AV地图。
在某些情况下,政府官员可以利用AV增长作为改善街道资本规划的机会。他们可能会投入更多的资金用于预测维修,从而消除一些昂贵的维修费用。这些努力可能包括在潜在问题升级之前派出无人机或AVs来发现它们。官员们还可以考虑与各种利益攸关方建立伙伴关系,如公用事业公司、交通部门和有线电视公司,以确保街道维修的协调和成本效益。例如,他们可以同意在同一段道路上同时进行维修和安装新的公用事业基础设施,或者在短时间内相继进行维修,从而消除了多次封路的需要。
对于那些忙于处理优先事项和紧张预算的政府官员来说,SAM可能不是一个迫在眉睫的问题。尽管传统汽车的数量远远超过自动驾驶汽车,但现在投资于SAM可以立即改善交通拥堵和交通状况。现在根据预测的需求采取行动,比以后根据现有的或正在出现的需求采取行动的成本要低。