
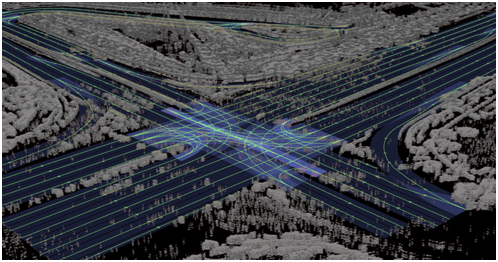
NVIDIA Drive Map 平台上的雷达层
英伟达在 GTC 2022 开发者大会上宣布,Drive Map 是一个地图平台,旨在通过更安全地部署,来加速 L3 和 L4 级自动驾驶汽车的到来。随着对周围环境产生更细致、深入的了解,驾驭这些车辆的自主系统有望作出更加明智的决策,从而提升道路使用者和行人的安全。
该平台基于去年被英伟达收购的初创公司 DeepMap 的技术,在过去六年中,该公司一直在开发高精细度的自动驾驶汽车地图。通过将这种测量技术引入专用的测试车辆中,并与用于乘用车的单独众包测绘引擎一起工作,然后将相关道路综合数据反馈到云端,Deep Map 得以构建横跨北美与欧亚的道路数字地图。
更细致地说,Drive Map 融汇了摄像头、雷达、以及激光雷达(LiDAR)系统在内的多个数据层,且每一层都可为操控自动驾驶汽车的系统赋予独特的用途。
比如自动驾驶的人工智能可以依靠摄像头数据来跟踪道路标记和交通信号灯和标志,在光线不足的情况下使用雷达数据层,并通过精度高达 5 厘米的激光雷达来获取极其详细的路况信息。
最后,展望 2024 年,英伟达预计 Drive Map 可覆盖全球 50 万公里的道路,并将持续提供后续更新,以供更广泛的自动驾驶汽车行业使用。