
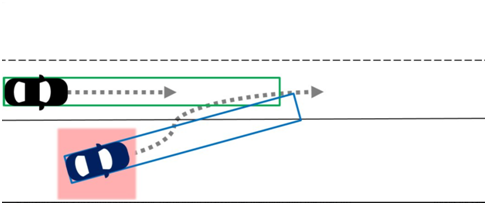
该场景中,危险的深蓝色汽车从一个未映射的区域并入道路。交通参与方的位置标识为威胁区域(红色方格),自动驾驶车的预测占领区(绿色)与合并交通参与方的预测占领区(蓝色)相交。
论文建立在之前的一项研究上,该研究在今年早些时候的IEEE Transactions on Intelligent Vehicles 上发表。之前的这项工作旨在为自动驾驶汽车提供态势感知环境能力,从而使其在复杂和动态的未知环境中更具响应性。
研究工作背后的核心理念是将感知资源仅分配给与当前情况相关的自动驾驶汽车周围的区域(例如,其当前的驾驶任务),而不是简单的 360°感知领域,通过这种方式,可以节省计算资源,从而提高自动驾驶汽车的效率。
当自动驾驶汽车的感知范围有限时,其安全性可能会大幅下降。例如,如果一辆车只认为其周围的特定区域是“相关的”,它可能无法检测到其他区域的潜在威胁物体。如果支持车辆功能的算法被编程为仅考虑和处理道路的特定区域,则可能会发生这种情况。
这就是我们的威胁区域识别方法发挥作用的地方:可能与潜在威胁相对应的区域在感知的早期阶段被标记为相关区域,以便可以可靠地感知这些区域内的对象并评估其实际碰撞/威胁风险。因此,我们的工作旨在设计一种仅基于在线信息的方法,即没有先验信息,例如以地图的形式,以识别可能与威胁相对应的区域。为了大规模应用,研究人员的框架应该尽可能轻量级。换句话说,它不应该需要大量的计算资源来持续扫描环境中的威胁。
研究人员提出的方法非常简单,因为它只需要执行有限数量的计算。此外,它具有很强的适应性,因此可以针对特定的用例或车辆进行定制。
本质上,该框架捕获环境的无模型表示,其中包括车辆周围所有移动物体的速度估计。这意味着,与其他方法相比,它不依赖于有限的、先前划定的相关区域地图。
具体来说,该项研究利用笛卡尔动态占用网格图 (DOGMa),它为光栅化环境的每个单元提供速度估计,据此,研究人员使用标准聚类算法来识别具有相似速度的足够大的细胞簇(一种改编自 Gies 等人的研究的方法),然后评估,假设已识别的簇的速度恒定,这些簇是否会相交随着自动驾驶汽车在设定的预测范围内移动。
如果团队的聚类算法识别出的移动细胞簇与车辆的运动相交,则可能会发生与相应物体的碰撞。为了避免这种情况,该团队的模型将集群的位置标记为应处理的相关区域,以便车辆能够感知其中的物体并调整其速度或方向以避免事故。
这一研究创建的框架与过去引入的其他威胁识别方法之间的主要区别在于,它试图尽早识别威胁。他们的方法首先识别包含移动对象的区域,然后使用他们之前工作中引入的技术为这些区域分配计算资源。
这使车辆能够在移动物体和潜在威胁靠近之前检测到它们的位置。一旦确定了这些,威胁评估模块将评估与这些物体发生碰撞的风险,并且计划者将描述避免这些碰撞的行动。该团队的论文只关注识别模型,因为威胁评估系统和规划器超出了他们的研究范围。
研究工作将在对部分感知数据进行区域资源分配的背景下进行,而不是在完整的 360°视野范围内,论文概述了保持对环境做出反应的能力而不局限于先验知识的(非常明显的)重要性。在这种情况下,研究人员已经证明简单和轻量级的实施可以显着提高对潜在碰撞威胁的可能反应时间。
研究人员在一系列模拟中评估了他们的框架,发现它可以改善自动驾驶汽车在不同关键场景中的运行。其中包括另一个交通参与者以不同方式接近车辆车道的场景。最后得出的结论是,安全不一定与始终如一的 360°多模式感知系统相关联,相反,安全也可以通过有效的感知系统来实现,该系统以智能方式并基于上下文知识以及在线信息(甚至可能是其他信息来源)适应自动化代理的情况。
新框架最终可以在现实环境中实施和测试,以提高自动驾驶汽车在动态环境中导航的安全性。与此同时,研究团队计划继续研究他们的方法,同时还设计新的模型来增强自动和半自动驾驶。未来,我们的目标是使用引入的态势感知方法来实现高效和安全感知的道路,早期危险区域识别只是这样一个系统所需的组件之一,未来还有几个挑战有待处理。